Unit test for AHRSFactor. More...
#include <CppUnitLite/TestHarness.h>#include <gtsam/base/TestableAssertions.h>#include <gtsam/base/debug.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/inference/Symbol.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/navigation/AHRSFactor.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/nonlinear/Marginals.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/factorTesting.h>#include <gtsam/slam/BetweenFactor.h>#include <cmath>#include <list>#include <memory>#include "gtsam/nonlinear/LevenbergMarquardtParams.h"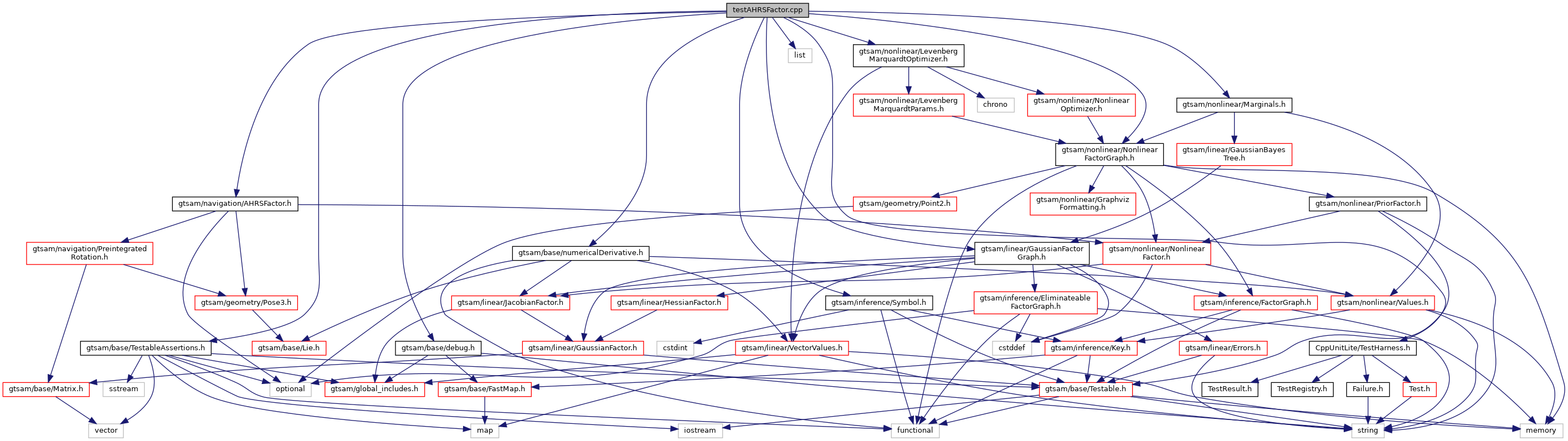
Go to the source code of this file.
Functions | |
| Vector3 | kZeroOmegaCoriolis (0, 0, 0) |
| int | main () |
| TEST (AHRSFactor, bodyPSensorWithBias) | |
| TEST (AHRSFactor, Error) | |
| TEST (AHRSFactor, ErrorWithBiases) | |
| TEST (AHRSFactor, ErrorWithBiasesAndSensorBodyDisplacement) | |
| TEST (AHRSFactor, FirstOrderPreIntegratedMeasurements) | |
| TEST (AHRSFactor, fistOrderExponential) | |
| TEST (AHRSFactor, graphTest) | |
| TEST (AHRSFactor, PartialDerivativeExpmap) | |
| TEST (AHRSFactor, PartialDerivativeLogmap) | |
| TEST (AHRSFactor, predictTest) | |
| TEST (AHRSFactor, PreintegratedAhrsMeasurements) | |
| TEST (AHRSFactor, PreintegratedAhrsMeasurementsConstructor) | |
Variables | |
| double | gyroNoiseVar = 0.01 |
| const Matrix3 | kMeasuredOmegaCovariance = gyroNoiseVar * I_3x3 |
Detailed Description
Unit test for AHRSFactor.
Definition in file testAHRSFactor.cpp.
Function Documentation
◆ kZeroOmegaCoriolis()
| Vector3 kZeroOmegaCoriolis | ( | 0 | , |
| 0 | , | ||
| 0 | |||
| ) |
◆ main()
| int main | ( | ) |
Definition at line 482 of file testAHRSFactor.cpp.
◆ TEST() [1/12]
| TEST | ( | AHRSFactor | , |
| bodyPSensorWithBias | |||
| ) |
Definition at line 410 of file testAHRSFactor.cpp.
◆ TEST() [2/12]
| TEST | ( | AHRSFactor | , |
| Error | |||
| ) |
Definition at line 129 of file testAHRSFactor.cpp.
◆ TEST() [3/12]
| TEST | ( | AHRSFactor | , |
| ErrorWithBiases | |||
| ) |
Definition at line 158 of file testAHRSFactor.cpp.
◆ TEST() [4/12]
| TEST | ( | AHRSFactor | , |
| ErrorWithBiasesAndSensorBodyDisplacement | |||
| ) |
Definition at line 308 of file testAHRSFactor.cpp.
◆ TEST() [5/12]
| TEST | ( | AHRSFactor | , |
| FirstOrderPreIntegratedMeasurements | |||
| ) |
< Current estimate of rotation rate bias
Definition at line 270 of file testAHRSFactor.cpp.
◆ TEST() [6/12]
| TEST | ( | AHRSFactor | , |
| fistOrderExponential | |||
| ) |
Definition at line 238 of file testAHRSFactor.cpp.
◆ TEST() [7/12]
| TEST | ( | AHRSFactor | , |
| graphTest | |||
| ) |
Definition at line 374 of file testAHRSFactor.cpp.
◆ TEST() [8/12]
| TEST | ( | AHRSFactor | , |
| PartialDerivativeExpmap | |||
| ) |
Definition at line 187 of file testAHRSFactor.cpp.
◆ TEST() [9/12]
| TEST | ( | AHRSFactor | , |
| PartialDerivativeLogmap | |||
| ) |
< Current estimate of rotation rate bias
Definition at line 213 of file testAHRSFactor.cpp.
◆ TEST() [10/12]
| TEST | ( | AHRSFactor | , |
| predictTest | |||
| ) |
Definition at line 341 of file testAHRSFactor.cpp.
◆ TEST() [11/12]
| TEST | ( | AHRSFactor | , |
| PreintegratedAhrsMeasurements | |||
| ) |
< Current estimate of angular rate bias
Definition at line 71 of file testAHRSFactor.cpp.
◆ TEST() [12/12]
| TEST | ( | AHRSFactor | , |
| PreintegratedAhrsMeasurementsConstructor | |||
| ) |
< Current estimate of angular rate bias
Definition at line 105 of file testAHRSFactor.cpp.
Variable Documentation
◆ gyroNoiseVar
| double gyroNoiseVar = 0.01 |
Definition at line 50 of file testAHRSFactor.cpp.
◆ kMeasuredOmegaCovariance
| const Matrix3 kMeasuredOmegaCovariance = gyroNoiseVar * I_3x3 |
Definition at line 51 of file testAHRSFactor.cpp.