#include <ccd/ccd.h>#include <ccd/quat.h>#include <ccd/vec3.h>#include "fcl/common/unused.h"#include "fcl/geometry/shape/box.h"#include "fcl/geometry/shape/capsule.h"#include "fcl/geometry/shape/cone.h"#include "fcl/geometry/shape/convex.h"#include "fcl/geometry/shape/cylinder.h"#include "fcl/geometry/shape/ellipsoid.h"#include "fcl/geometry/shape/halfspace.h"#include "fcl/geometry/shape/plane.h"#include "fcl/geometry/shape/sphere.h"#include "fcl/geometry/shape/triangle_p.h"#include "fcl/narrowphase/detail/convexity_based_algorithm/simplex.h"#include "fcl/narrowphase/detail/convexity_based_algorithm/polytope.h"#include "fcl/narrowphase/detail/convexity_based_algorithm/alloc.h"#include "fcl/narrowphase/detail/convexity_based_algorithm/list.h"#include "fcl/narrowphase/detail/convexity_based_algorithm/gjk_libccd-inl.h"
Include dependency graph for gjk_libccd.h:

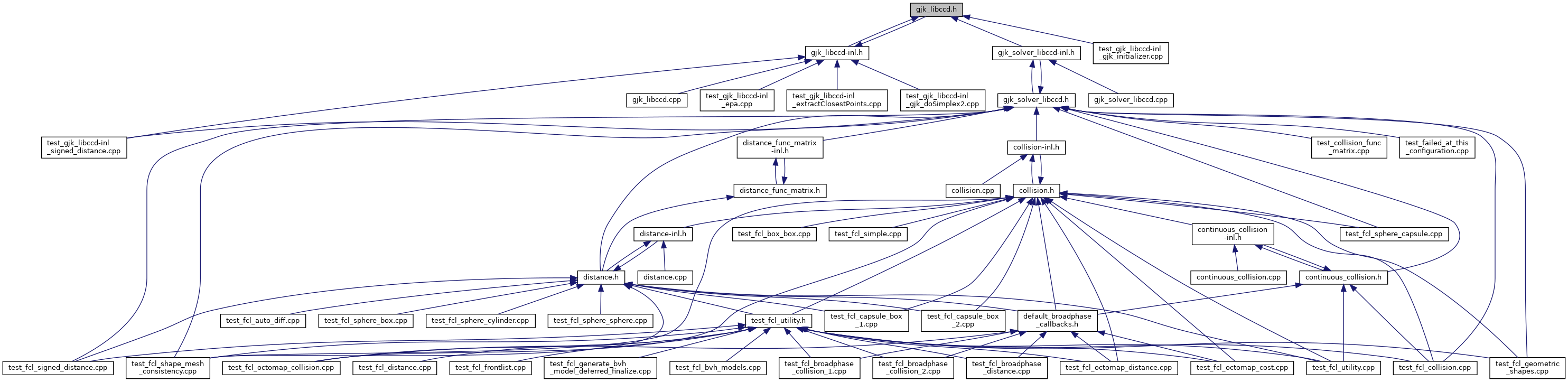
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | fcl::detail::GJKInitializer< S, T > |
| initialize GJK stuffs More... | |
| class | fcl::detail::GJKInitializer< S, Box< S > > |
| initialize GJK Box | |
| class | fcl::detail::GJKInitializer< S, Capsule< S > > |
| initialize GJK Capsule | |
| class | fcl::detail::GJKInitializer< S, Cone< S > > |
| initialize GJK Cone | |
| class | fcl::detail::GJKInitializer< S, Convex< S > > |
| initialize GJK Convex | |
| class | fcl::detail::GJKInitializer< S, Cylinder< S > > |
| initialize GJK Cylinder | |
| class | fcl::detail::GJKInitializer< S, Ellipsoid< S > > |
| initialize GJK Ellipsoid | |
| class | fcl::detail::GJKInitializer< S, Sphere< S > > |
| initialize GJK Sphere | |
Namespaces | |
| fcl | |
| Main namespace. | |
| fcl::detail | |
Typedefs | |
| using | fcl::detail::GJKCenterFunction = void(*)(const void *obj, ccd_vec3_t *c) |
| using | fcl::detail::GJKSupportFunction = void(*)(const void *obj, const ccd_vec3_t *dir_, ccd_vec3_t *v) |
| callback function used by GJK algorithm More... | |
Functions | |
| template<typename S > | |
| FCL_EXPORT bool | fcl::detail::GJKCollide (void *obj1, ccd_support_fn supp1, ccd_center_fn cen1, void *obj2, ccd_support_fn supp2, ccd_center_fn cen2, unsigned int max_iterations, S tolerance, Vector3< S > *contact_points, S *penetration_depth, Vector3< S > *normal) |
| GJK collision algorithm. More... | |
| template<typename S > | |
| FCL_EXPORT bool | fcl::detail::GJKDistance (void *obj1, ccd_support_fn supp1, void *obj2, ccd_support_fn supp2, unsigned int max_iterations, S tolerance, S *dist, Vector3< S > *p1, Vector3< S > *p2) |
| template<typename S > | |
| FCL_EXPORT bool | fcl::detail::GJKSignedDistance (void *obj1, ccd_support_fn supp1, void *obj2, ccd_support_fn supp2, unsigned int max_iterations, S tolerance, S *dist, Vector3< S > *p1, Vector3< S > *p2) |
| template<typename S > | |
| FCL_EXPORT void * | fcl::detail::triCreateGJKObject (const Vector3< S > &P1, const Vector3< S > &P2, const Vector3< S > &P3) |
| template<typename S > | |
| FCL_EXPORT void * | fcl::detail::triCreateGJKObject (const Vector3< S > &P1, const Vector3< S > &P2, const Vector3< S > &P3, const Transform3< S > &tf) |
| void | fcl::detail::triDeleteGJKObject (void *o_) |
| GJKCenterFunction | fcl::detail::triGetCenterFunction () |
| GJKSupportFunction | fcl::detail::triGetSupportFunction () |
| initialize GJK Triangle More... | |