#include <gazebo/gazebo.hh>#include <ros/ros.h>#include <boost/bind.hpp>#include <boost/shared_ptr.hpp>#include <geometry_msgs/TwistWithCovarianceStamped.h>#include <geometry_msgs/PoseStamped.h>#include <sensor_msgs/Range.h>#include <uuv_sensor_ros_plugins/ROSBaseModelPlugin.hh>#include <uuv_sensor_ros_plugins_msgs/DVL.h>#include <uuv_sensor_ros_plugins_msgs/DVLBeam.h>#include <message_filters/subscriber.h>#include <message_filters/time_synchronizer.h>#include <tf/transform_listener.h>#include <vector>#include "SensorDvl.pb.h"
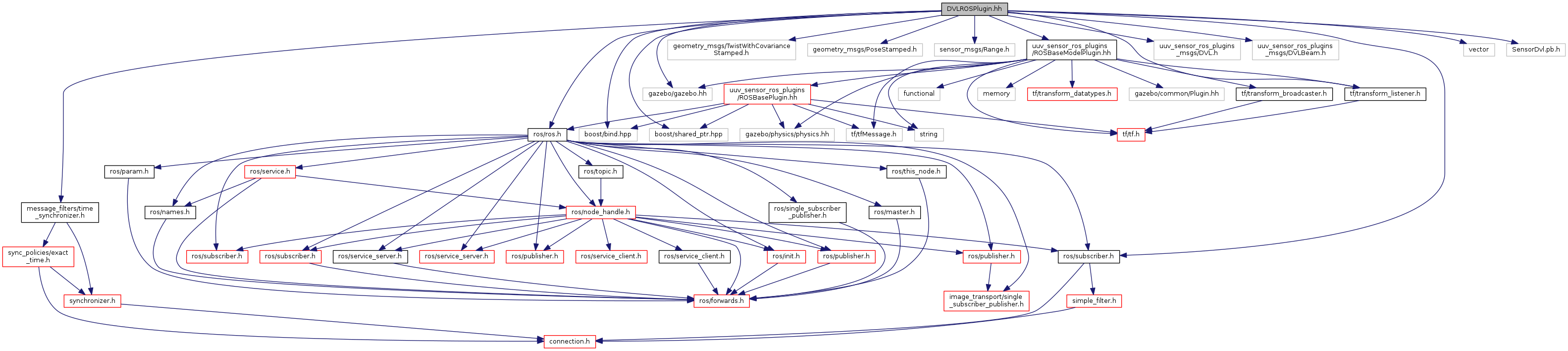
Include dependency graph for DVLROSPlugin.hh:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gazebo::DVLROSPlugin |
| TODO: Modify computation of velocity using the beams. More... | |
Namespaces | |
| gazebo | |
Macros | |
| #define | ALTITUDE_OUT_OF_RANGE -1.0 |
Macro Definition Documentation
| #define ALTITUDE_OUT_OF_RANGE -1.0 |
Definition at line 35 of file DVLROSPlugin.hh.