#include <eigen3/Eigen/Dense>#include <tuw_global_router/srr_utils.h>#include <geometry_msgs/Pose.h>#include <ros/ros.h>
Include dependency graph for mrr_utils.h:

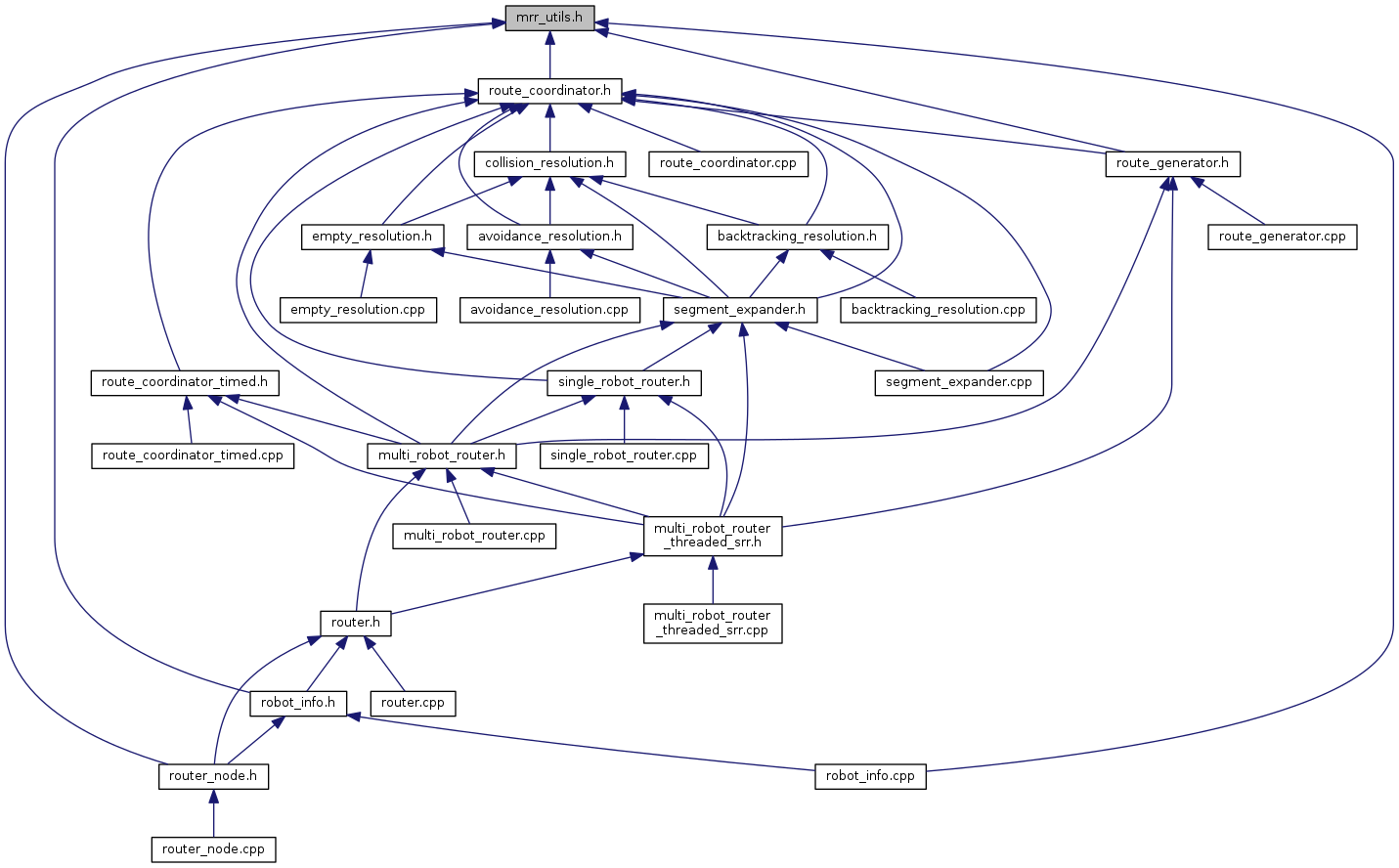
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | multi_robot_router::Checkpoint |
| struct | multi_robot_router::Checkpoint::Precondition |
Namespaces | |
| multi_robot_router | |
Functions | |
| geometry_msgs::Pose & | multi_robot_router::copy (const Eigen::Vector3d &src, geometry_msgs::Pose &des) |
| geometry_msgs::Pose | multi_robot_router::copy (const Eigen::Vector3d &src) |
| Eigen::Vector3d & | multi_robot_router::copy (const geometry_msgs::Pose &src, Eigen::Vector3d &des) |
| Eigen::Vector3d | multi_robot_router::copy (const geometry_msgs::Pose &src) |