#include <head_control_module.h>
|
| void | afterMoveLidar () |
| |
| void | beforeMoveLidar (double start_angle) |
| |
| Eigen::MatrixXd | calcLinearInterpolationTra (double pos_start, double pos_end, double smp_time, double mov_time) |
| |
| Eigen::MatrixXd | calcMinimumJerkTraPVA (double pos_start, double vel_start, double accel_start, double pos_end, double vel_end, double accel_end, double smp_time, double mov_time) |
| |
| void | finishMoving () |
| |
| void | get3DLidarCallback (const std_msgs::String::ConstPtr &msg) |
| |
| void | get3DLidarRangeCallback (const std_msgs::Float64::ConstPtr &msg) |
| |
| void | jointTraGeneThread () |
| |
| void | lidarJointTraGeneThread () |
| |
| void | publishDoneMsg (const std::string done_msg) |
| |
| void | publishLidarMoveMsg (std::string msg_data) |
| |
| void | publishStatusMsg (unsigned int type, std::string msg) |
| |
| void | queueThread () |
| |
| void | setHeadJointCallback (const sensor_msgs::JointState::ConstPtr &msg) |
| |
| void | setHeadJointTimeCallback (const thormang3_head_control_module_msgs::HeadJointPose::ConstPtr &msg) |
| |
| void | startMoveLidar (double target_angle) |
| |
| void | startMoving () |
| |
| void | stopMoving () |
| |
Definition at line 45 of file head_control_module.h.
| HeadControlModule::HeadControlModule |
( |
| ) |
|
| HeadControlModule::~HeadControlModule |
( |
| ) |
|
|
virtual |
| void HeadControlModule::afterMoveLidar |
( |
| ) |
|
|
private |
| void HeadControlModule::beforeMoveLidar |
( |
double |
start_angle | ) |
|
|
private |
| Eigen::MatrixXd HeadControlModule::calcLinearInterpolationTra |
( |
double |
pos_start, |
|
|
double |
pos_end, |
|
|
double |
smp_time, |
|
|
double |
mov_time |
|
) |
| |
|
private |
| Eigen::MatrixXd HeadControlModule::calcMinimumJerkTraPVA |
( |
double |
pos_start, |
|
|
double |
vel_start, |
|
|
double |
accel_start, |
|
|
double |
pos_end, |
|
|
double |
vel_end, |
|
|
double |
accel_end, |
|
|
double |
smp_time, |
|
|
double |
mov_time |
|
) |
| |
|
private |
| void HeadControlModule::finishMoving |
( |
| ) |
|
|
private |
| void HeadControlModule::get3DLidarCallback |
( |
const std_msgs::String::ConstPtr & |
msg | ) |
|
|
private |
| void HeadControlModule::get3DLidarRangeCallback |
( |
const std_msgs::Float64::ConstPtr & |
msg | ) |
|
|
private |
| bool HeadControlModule::isRunning |
( |
| ) |
|
|
virtual |
| void HeadControlModule::jointTraGeneThread |
( |
| ) |
|
|
private |
| void HeadControlModule::lidarJointTraGeneThread |
( |
| ) |
|
|
private |
| void HeadControlModule::publishDoneMsg |
( |
const std::string |
done_msg | ) |
|
|
private |
| void HeadControlModule::publishLidarMoveMsg |
( |
std::string |
msg_data | ) |
|
|
private |
| void HeadControlModule::publishStatusMsg |
( |
unsigned int |
type, |
|
|
std::string |
msg |
|
) |
| |
|
private |
| void HeadControlModule::queueThread |
( |
| ) |
|
|
private |
| void HeadControlModule::setHeadJointCallback |
( |
const sensor_msgs::JointState::ConstPtr & |
msg | ) |
|
|
private |
| void HeadControlModule::setHeadJointTimeCallback |
( |
const thormang3_head_control_module_msgs::HeadJointPose::ConstPtr & |
msg | ) |
|
|
private |
| void HeadControlModule::startMoveLidar |
( |
double |
target_angle | ) |
|
|
private |
| void HeadControlModule::startMoving |
( |
| ) |
|
|
private |
| void HeadControlModule::stop |
( |
| ) |
|
|
virtual |
| void HeadControlModule::stopMoving |
( |
| ) |
|
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::calc_joint_accel_tra_ |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::calc_joint_tra_ |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::calc_joint_vel_tra_ |
|
private |
| int thormang3::HeadControlModule::control_cycle_msec_ |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::current_position_ |
|
private |
| int thormang3::HeadControlModule::current_state_ |
|
private |
| const bool thormang3::HeadControlModule::DEBUG |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::goal_acceleration_ |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::goal_position_ |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::goal_velocity_ |
|
private |
| bool thormang3::HeadControlModule::is_direct_control_ |
|
private |
| bool thormang3::HeadControlModule::is_moving_ |
|
private |
| double thormang3::HeadControlModule::moving_time_ |
|
private |
| double thormang3::HeadControlModule::original_position_lidar_ |
|
private |
| boost::thread thormang3::HeadControlModule::queue_thread_ |
|
private |
| const double thormang3::HeadControlModule::SCAN_END_ANGLE = 85 * M_PI / 180 |
|
private |
| double thormang3::HeadControlModule::scan_range_ |
|
private |
| const double thormang3::HeadControlModule::SCAN_START_ANGLE = -10 * M_PI / 180 |
|
private |
| bool thormang3::HeadControlModule::stop_process_ |
|
private |
| Eigen::MatrixXd thormang3::HeadControlModule::target_position_ |
|
private |
| int thormang3::HeadControlModule::tra_count_ |
|
private |
| boost::thread* thormang3::HeadControlModule::tra_gene_thread_ |
|
private |
| boost::mutex thormang3::HeadControlModule::tra_lock_ |
|
private |
| int thormang3::HeadControlModule::tra_size_ |
|
private |
| std::map<std::string, int> thormang3::HeadControlModule::using_joint_name_ |
|
private |
The documentation for this class was generated from the following files:
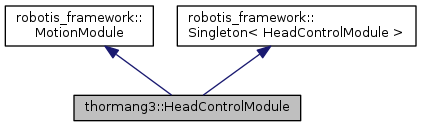
 Public Member Functions inherited from robotis_framework::MotionModule
Public Member Functions inherited from robotis_framework::MotionModule