#include <rtt_rostopic_ros_publish_activity.hpp>
Public Types | |
| typedef boost::shared_ptr< RosPublishActivity > | shared_ptr |
 Public Types inherited from RTT::base::ActivityInterface Public Types inherited from RTT::base::ActivityInterface | |
| typedef boost::shared_ptr< ActivityInterface > | shared_ptr |
Public Member Functions | |
| void | addPublisher (RosPublisher *pub) |
| void | removePublisher (RosPublisher *pub) |
| ~RosPublishActivity () | |
| Public Member Functions inherited from RTT::Activity | |
| Activity (base::RunnableInterface *r=0, const std::string &name="Activity") | |
| Activity (int priority, base::RunnableInterface *r=0, const std::string &name="Activity") | |
| Activity (int scheduler, int priority, base::RunnableInterface *r=0, const std::string &name="Activity") | |
| Activity (int scheduler, int priority, Seconds period, base::RunnableInterface *r=0, const std::string &name="Activity") | |
| Activity (int priority, Seconds period, base::RunnableInterface *r=0, const std::string &name="Activity") | |
| Activity (int scheduler, int priority, Seconds period, unsigned cpu_affinity, base::RunnableInterface *r=0, const std::string &name="Activity") | |
| virtual bool | breakLoop () |
| virtual bool | execute () |
| virtual void | finalize () |
| virtual unsigned | getCpuAffinity () const |
| virtual Seconds | getPeriod () const |
| virtual bool | initialize () |
| virtual bool | isActive () const |
| virtual bool | isPeriodic () const |
| virtual bool | isRunning () const |
| virtual bool | setCpuAffinity (unsigned cpu) |
| virtual bool | setPeriod (Seconds period) |
| void | setWaitPeriodPolicy (int p) |
| virtual bool | start () |
| virtual void | step () |
| virtual bool | stop () |
| virtual os::ThreadInterface * | thread () |
| virtual bool | timeout () |
| virtual bool | trigger () |
| virtual void | work (base::RunnableInterface::WorkReason reason) |
| virtual | ~Activity () |
| Public Member Functions inherited from RTT::base::ActivityInterface | |
| ActivityInterface () | |
| ActivityInterface (RunnableInterface *run) | |
| virtual RunnableInterface * | getRunner () const |
| virtual bool | run (RunnableInterface *r) |
| virtual | ~ActivityInterface () |
| Public Member Functions inherited from RTT::os::Thread | |
| virtual int | getMaxOverrun () const |
| virtual const char * | getName () const |
| void | getPeriod (secs &s, nsecs &ns) const |
| virtual nsecs | getPeriodNS () const |
| virtual unsigned int | getPid () const |
| virtual int | getPriority () const |
| virtual int | getScheduler () const |
| Seconds | getStopTimeout () const |
| virtual RTOS_TASK * | getTask () |
| virtual const RTOS_TASK * | getTask () const |
| virtual void | setMaxOverrun (int m) |
| bool | setPeriod (Seconds s) |
| bool | setPeriod (TIME_SPEC p) |
| bool | setPeriod (secs s, nsecs ns) |
| virtual bool | setPriority (int priority) |
| virtual bool | setScheduler (int sched_type) |
| void | setStopTimeout (Seconds s) |
| Thread (int scheduler, int priority, double period, unsigned cpu_affinity, const std::string &name) | |
| virtual void | yield () |
| virtual | ~Thread () |
| Public Member Functions inherited from RTT::os::ThreadInterface | |
| bool | isSelf () const |
| ThreadInterface () | |
| unsigned int | threadNumber () const |
| virtual | ~ThreadInterface () |
Static Public Member Functions | |
| static shared_ptr | Instance () |
| Static Public Member Functions inherited from RTT::os::Thread | |
| static void | setLockTimeoutNoPeriod (double timeout_in_s) |
| static void | setLockTimeoutPeriodFactor (double factor) |
| static void | setStackSize (unsigned int ssize) |
Private Types | |
| typedef Publishers::iterator | iterator |
| typedef std::set< RosPublisher * > | Publishers |
| typedef boost::weak_ptr< RosPublishActivity > | weak_ptr |
Private Member Functions | |
| void | loop () |
| RosPublishActivity (const std::string &name) | |
Private Attributes | |
| Publishers | publishers |
| RTT::os::Mutex | publishers_lock |
Static Private Attributes | |
| static weak_ptr | ros_pub_act |
| This pointer may not be refcounted since it would prevent cleanup. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from RTT::base::ActivityInterface | |
| void | disableRun (RunnableInterface *caller) |
| Protected Member Functions inherited from RTT::os::Thread | |
| void | emergencyStop () |
| void | terminate () |
| Protected Attributes inherited from RTT::Activity | |
| os::Condition | msg_cond |
| os::Mutex | msg_lock |
| bool | mstopRequested |
| bool | mtimeout |
| int | mwaitpolicy |
| double | update_period |
| Protected Attributes inherited from RTT::base::ActivityInterface | |
| RunnableInterface * | runner |
| Protected Attributes inherited from RTT::os::Thread | |
| bool | active |
| MutexRecursive | breaker |
| bool | inloop |
| int | maxOverRun |
| int | msched_type |
| NANO_TIME | period |
| bool | prepareForExit |
| RTOS_TASK | rtos_task |
| bool | running |
| rt_sem_t | sem |
| double | stopTimeout |
| Protected Attributes inherited from RTT::os::ThreadInterface | |
| int | threadnb |
| Static Protected Attributes inherited from RTT::os::Thread | |
| static unsigned int | default_stack_size |
| static double | lock_timeout_no_period_in_s |
| static double | lock_timeout_period_factor |
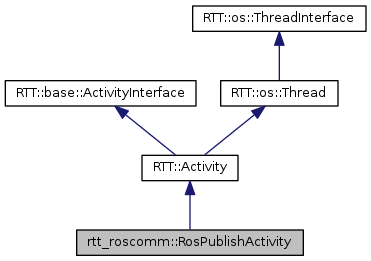
Detailed Description
A process wide thread that handles all publishing of ROS topics of the current process. There is no strong reason why only one publisher should exist, in later implementations, one publisher thread per channel may exist as well. See the usage recommendations for Instance()
Definition at line 67 of file rtt_rostopic_ros_publish_activity.hpp.
Member Typedef Documentation
|
private |
Definition at line 80 of file rtt_rostopic_ros_publish_activity.hpp.
|
private |
A set keeping track of all publishers in the current process. It must be guarded by the mutex since insertion/removal happens concurrently.
Definition at line 79 of file rtt_rostopic_ros_publish_activity.hpp.
Definition at line 70 of file rtt_rostopic_ros_publish_activity.hpp.
|
private |
Definition at line 72 of file rtt_rostopic_ros_publish_activity.hpp.
Constructor & Destructor Documentation
|
private |
Definition at line 38 of file rtt_rostopic_ros_publish_activity.cpp.
| rtt_roscomm::RosPublishActivity::~RosPublishActivity | ( | ) |
Definition at line 72 of file rtt_rostopic_ros_publish_activity.cpp.
Member Function Documentation
| void rtt_roscomm::RosPublishActivity::addPublisher | ( | RosPublisher * | pub | ) |
Definition at line 62 of file rtt_rostopic_ros_publish_activity.cpp.
|
static |
Returns the single instance of the RosPublisher. This function is not thread-safe when it creates the RosPublisher object. Therefor, it is advised to cache the object which Intance() returns such that, in the unlikely event that two publishers exist, you consistently keep using the same instance, which is fine then.
Definition at line 52 of file rtt_rostopic_ros_publish_activity.cpp.
|
privatevirtual |
Reimplemented from RTT::Activity.
Definition at line 45 of file rtt_rostopic_ros_publish_activity.cpp.
| void rtt_roscomm::RosPublishActivity::removePublisher | ( | RosPublisher * | pub | ) |
Definition at line 67 of file rtt_rostopic_ros_publish_activity.cpp.
Member Data Documentation
|
private |
Definition at line 81 of file rtt_rostopic_ros_publish_activity.hpp.
|
private |
Definition at line 82 of file rtt_rostopic_ros_publish_activity.hpp.
|
staticprivate |
This pointer may not be refcounted since it would prevent cleanup.
Definition at line 74 of file rtt_rostopic_ros_publish_activity.hpp.
The documentation for this class was generated from the following files: