The template class for the node parameters. The graph of poses with support to tree construction functionalities. More...
#include <iostream>#include <assert.h>#include <set>#include <list>#include <map>#include <deque>#include <vector>#include <limits>#include <algorithm>#include "posegraph.hxx"
Include dependency graph for posegraph.hh:

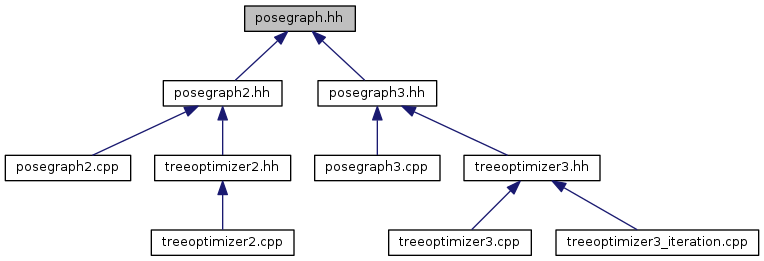
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | AISNavigation::TreePoseGraph< Ops >::Edge |
| Definition of an edge in the graph based on the template input from Ops. More... | |
| struct | AISNavigation::EVComparator< E > |
| A comparator class (struct) that compares the level of two vertices if edges. More... | |
| struct | AISNavigation::LevelAssigner< TPG > |
| A class (struct) to dermine the level of a vertex in the tree. More... | |
| struct | AISNavigation::LoopChecker< TPG > |
| struct | AISNavigation::TreePoseGraph< Ops > |
| The template class for representing an abstract tree without specifing the dimensionality of the exact parameterization of the nodes. This definition is passed in via the Operation (Ops) template class. More... | |
| struct | AISNavigation::TreePoseGraph< Ops >::Vertex |
| Definition of a vertex in the graph based on the template input from Ops. More... | |
Namespaces | |
| AISNavigation | |
Detailed Description
The template class for the node parameters. The graph of poses with support to tree construction functionalities.
Definition in file posegraph.hh.