#include "rdl_dynamics/FrameObject.hpp"#include "rdl_dynamics/FrameVector.hpp"#include "rdl_dynamics/MotionVector.hpp"
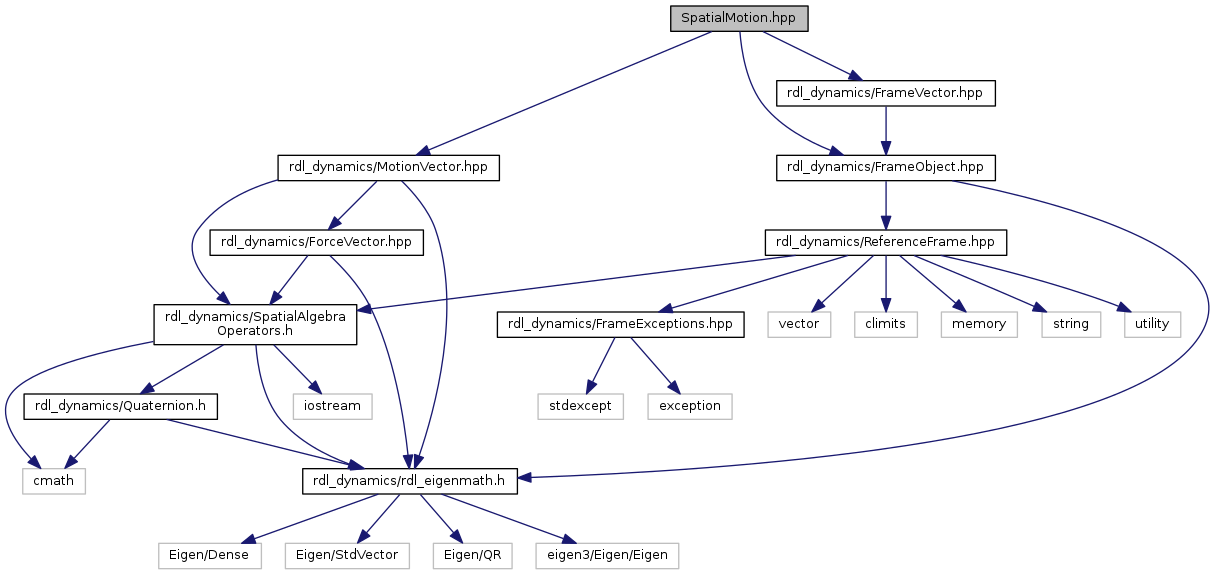
Include dependency graph for SpatialMotion.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::SpatialMotion |
| A SpatialMotion vector is a MotionVector with a RobotDynamics::ReferenceFrame it is expressed in. This allows for runtime checks that frame rules are obeyed and makes it easy to change the frame the metion vector is expressed in. As with a SpatialAcceleration, a SpatialMotion vector is the spatial velocity of a SpatialMotion::bodyFrame relative to a SpatialMotion::baseFrame and is expressed in RobotDynamics::FrameObject::referenceFrame. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |
Typedefs | |
| typedef std::vector< SpatialMotion, Eigen::aligned_allocator< SpatialMotion > > | RobotDynamics::Math::SpatialMotionV |
Functions | |
| EIGEN_STRONG_INLINE SpatialMotion | RobotDynamics::Math::operator% (SpatialMotion v1, const SpatialMotion &v2) |
| EIGEN_STRONG_INLINE SpatialMotion | RobotDynamics::Math::operator+ (SpatialMotion v1, const SpatialMotion &v2) |
| EIGEN_STRONG_INLINE SpatialMotion | RobotDynamics::Math::operator- (SpatialMotion v1, const SpatialMotion &v2) |