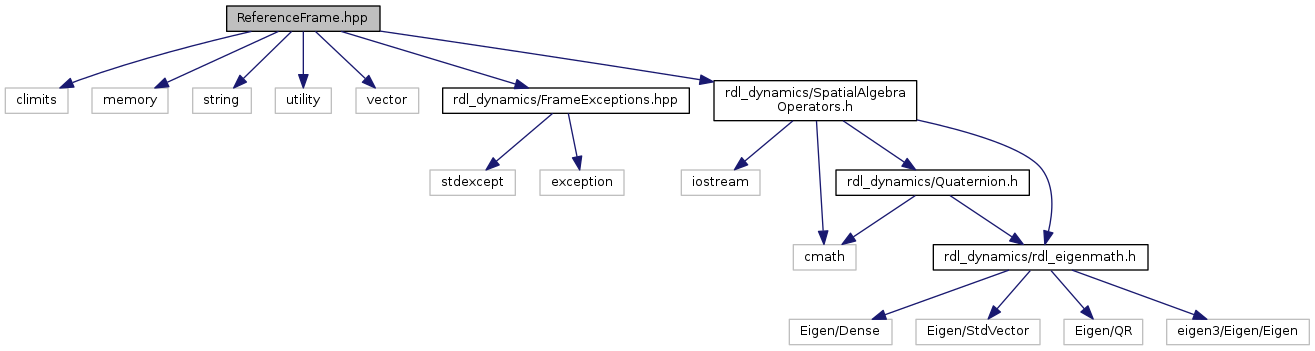
#include <climits>#include <memory>#include <string>#include <utility>#include <vector>#include "rdl_dynamics/FrameExceptions.hpp"#include "rdl_dynamics/SpatialAlgebraOperators.h"
Include dependency graph for ReferenceFrame.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::FixedReferenceFrame |
| class | RobotDynamics::ReferenceFrame |
| ReferenceFrame object used to tell what frame objects are expressed in. Every ReferenceFrame has a pointer to its parent ReferenceFrame. This parent frame is NOT allowed to be nullptr. The ONLY ReferenceFrame that is allowed to have parentFrame=nullptr is the world frame. There is only one world frame and it can be accessed by the static method ReferenceFrame::getWorldFrame() which will return a shared_ptr to the world frame. This class and its implementation are an adaptation of ReferenceFrame.java by Jerry Pratt and the IHMC Robotics Group. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
Typedefs | |
| typedef std::shared_ptr< FixedReferenceFrame > | RobotDynamics::FixedReferenceFramePtr |
| typedef std::vector< FixedReferenceFramePtr > | RobotDynamics::FixedReferenceFramePtrV |
| typedef std::shared_ptr< ReferenceFrame > | RobotDynamics::ReferenceFramePtr |
| typedef std::vector< ReferenceFramePtr > | RobotDynamics::ReferenceFramePtrV |