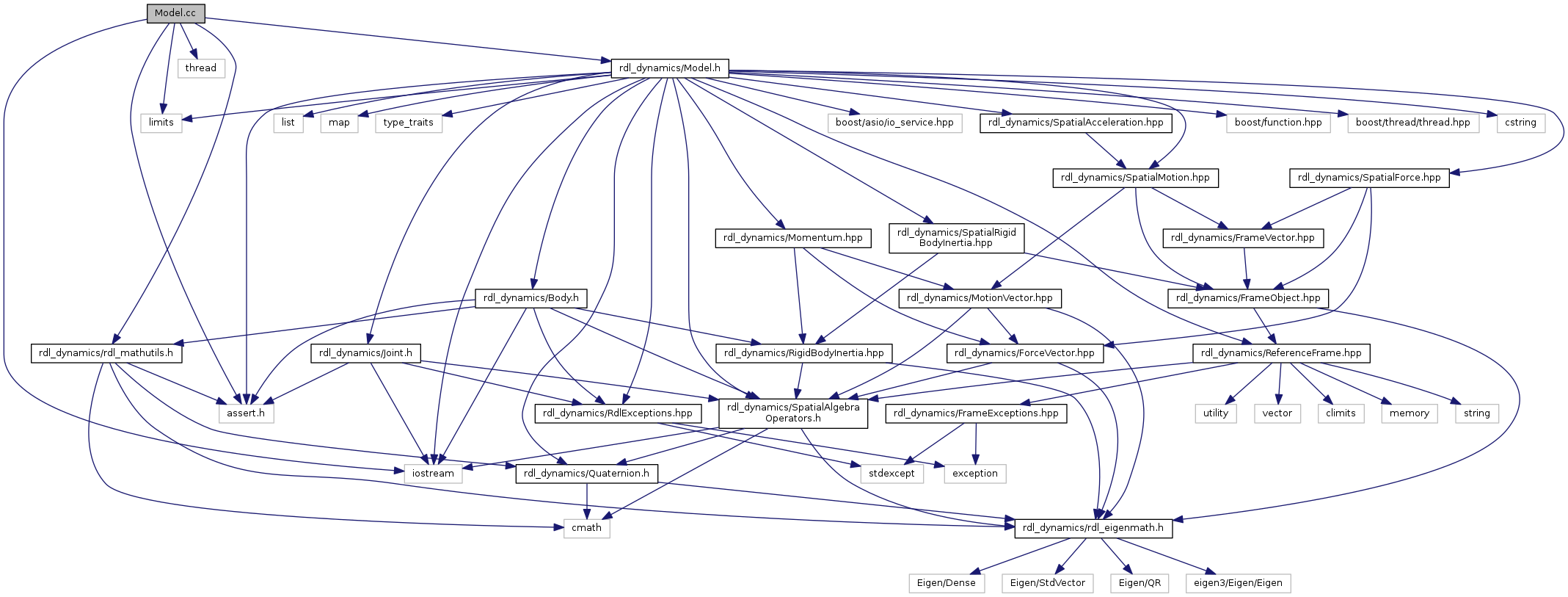
#include <assert.h>#include <iostream>#include <limits>#include <thread>#include "rdl_dynamics/rdl_mathutils.h"#include "rdl_dynamics/Model.h"
Include dependency graph for Model.cc:
Go to the source code of this file.
Functions | |
| unsigned int | addBodyFixedJoint (Model &model, const unsigned int parent_id, const SpatialTransform &joint_frame, const Joint &joint, const Body &body, std::string body_name) |
| unsigned int | addBodyMultiDofJoint (Model &model, const unsigned int parent_id, const SpatialTransform &joint_frame, const Joint &joint, const Body &body, std::string body_name) |
Function Documentation
| unsigned int addBodyFixedJoint | ( | Model & | model, |
| const unsigned int | parent_id, | ||
| const SpatialTransform & | joint_frame, | ||
| const Joint & | joint, | ||
| const Body & | body, | ||
| std::string | body_name | ||
| ) |