#include "rdl_dynamics/FrameObject.hpp"
Include dependency graph for FrameVector.hpp:
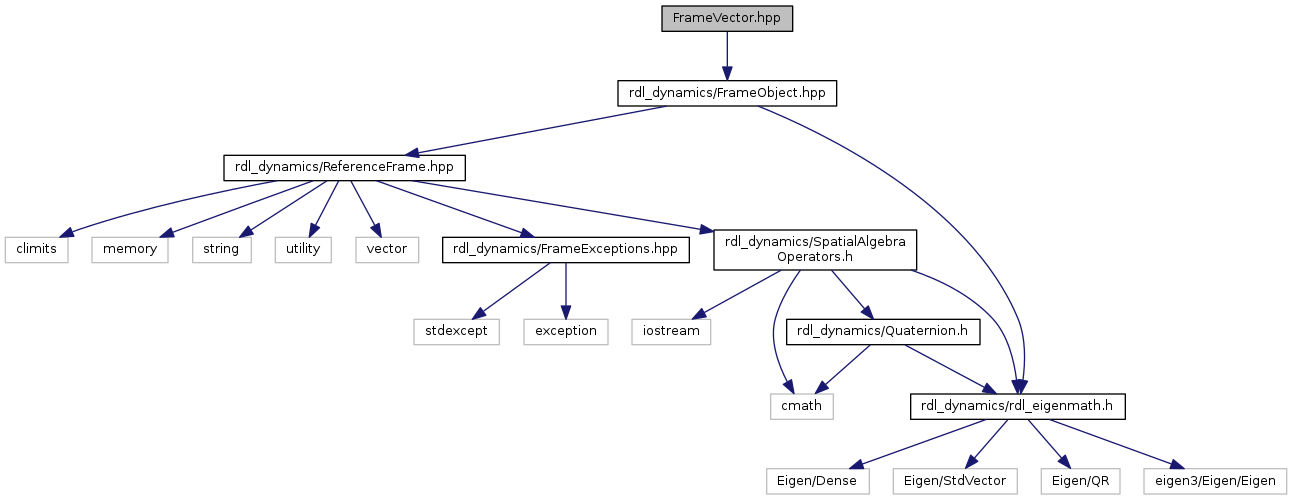
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::FrameVector |
| A FrameVector is a 3D vector with a ReferenceFrame, and all operations between FrameVectors and other frame objects will perform runtime checks that objects are expressed in the same frames. This class and its implementation are an adaptation of FrameVector.java by Jerry Pratt and the IHMC Robotics Group. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |
Typedefs | |
| typedef std::vector< FrameVector, Eigen::aligned_allocator< FrameVector > > | RobotDynamics::Math::FrameVectorV |
Functions | |
| template<typename T > | |
| FrameVector | RobotDynamics::Math::operator* (FrameVector v1, const T scale) |
| template<typename T > | |
| FrameVector | RobotDynamics::Math::operator* (const T scale, FrameVector v1) |
| FrameVector | RobotDynamics::Math::operator+ (FrameVector v1, const Vector3d v2) |
| FrameVector | RobotDynamics::Math::operator+ (FrameVector v1, const FrameVector v2) |
| Add two FrameVectors together. More... | |
| FrameVector | RobotDynamics::Math::operator- (FrameVector v1, const Vector3d v2) |
| FrameVector | RobotDynamics::Math::operator- (FrameVector v1, const FrameVector v2) |
| Add two FrameVectors together. More... | |