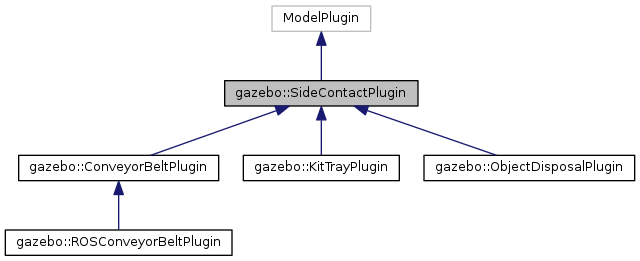
A plugin for a model with a contact sensor that only monitors collisions on one of its sides. More...
#include <SideContactPlugin.hh>
Public Member Functions | |
| virtual void | Load (physics::ModelPtr _model, sdf::ElementPtr _sdf) |
| Load the sensor plugin. More... | |
| SideContactPlugin () | |
| Constructor. More... | |
| virtual | ~SideContactPlugin () |
| Destructor. More... | |
Protected Member Functions | |
| virtual void | CalculateContactingLinks () |
| Determine which links are in contact with the side of the parent link. More... | |
| virtual void | CalculateContactingModels () |
| Determine which models are in contact with the side of the parent link. More... | |
| bool | FindContactSensor () |
| Iterate through links of model to find sensor with the specified name. More... | |
| virtual void | OnContactsReceived (ConstContactsPtr &_msg) |
| Callback that recieves the contact sensor's messages. More... | |
| virtual void | OnUpdate (const common::UpdateInfo &_info) |
| Called when world update events are received. More... | |
Protected Attributes | |
| std::string | collisionName |
| Name of the collision of the parent's link. More... | |
| std::set< physics::LinkPtr > | contactingLinks |
| Set of pointers to links that have collisions with the parent link's side. More... | |
| std::set< physics::ModelPtr > | contactingModels |
| Set of pointers to models that have collisions with the parent link's side. More... | |
| std::string | contactSensorName |
| Name of the contact sensor. More... | |
| transport::SubscriberPtr | contactSub |
| Subscriber for the contact topic. More... | |
| physics::ModelPtr | model |
| Pointer to the model. More... | |
| boost::mutex | mutex |
| Mutex for protecting contacts msg. More... | |
| msgs::Contacts | newestContactsMsg |
| Contacts msg received. More... | |
| bool | newMsg |
| Flag for new contacts message. More... | |
| transport::NodePtr | node |
| Pointer to this node for publishing/subscribing. More... | |
| physics::LinkPtr | parentLink |
| Pointer to the sensor's parent's link. More... | |
| sensors::ContactSensorPtr | parentSensor |
| Pointer to the contact sensor. More... | |
| std::string | scopedContactSensorName |
| Scoped name of the contact sensor. More... | |
| ignition::math::Vector3d | sideNormal |
| The normal, in local frame, to the side that is to have contacts monitored (default (0, 0, 1)) More... | |
| event::ConnectionPtr | updateConnection |
| Pointer to the update event connection. More... | |
| physics::WorldPtr | world |
| Pointer to the world. More... | |
Detailed Description
A plugin for a model with a contact sensor that only monitors collisions on one of its sides.
Definition at line 35 of file SideContactPlugin.hh.
Constructor & Destructor Documentation
| SideContactPlugin::SideContactPlugin | ( | ) |
Constructor.
Definition at line 28 of file SideContactPlugin.cc.
|
virtual |
Destructor.
Definition at line 33 of file SideContactPlugin.cc.
Member Function Documentation
|
protectedvirtual |
Determine which links are in contact with the side of the parent link.
Definition at line 145 of file SideContactPlugin.cc.
|
protectedvirtual |
Determine which models are in contact with the side of the parent link.
Definition at line 189 of file SideContactPlugin.cc.
|
protected |
Iterate through links of model to find sensor with the specified name.
- Returns
- true if the sensor was successfully found and is a contact sensor
Definition at line 106 of file SideContactPlugin.cc.
|
virtual |
Load the sensor plugin.
- Parameters
-
[in] _sensor Pointer to the sensor that loaded this plugin. [in] _sdf SDF element that describes the plugin.
Reimplemented in gazebo::KitTrayPlugin, gazebo::ConveyorBeltPlugin, gazebo::ObjectDisposalPlugin, and gazebo::ROSConveyorBeltPlugin.
Definition at line 41 of file SideContactPlugin.cc.
|
protectedvirtual |
Callback that recieves the contact sensor's messages.
Definition at line 131 of file SideContactPlugin.cc.
|
protectedvirtual |
Called when world update events are received.
- Parameters
-
[in] _info Update information provided by the server.
Reimplemented in gazebo::KitTrayPlugin, gazebo::ConveyorBeltPlugin, and gazebo::ObjectDisposalPlugin.
Definition at line 139 of file SideContactPlugin.cc.
Member Data Documentation
|
protected |
Name of the collision of the parent's link.
Definition at line 93 of file SideContactPlugin.hh.
|
protected |
Set of pointers to links that have collisions with the parent link's side.
Definition at line 99 of file SideContactPlugin.hh.
|
protected |
Set of pointers to models that have collisions with the parent link's side.
Definition at line 102 of file SideContactPlugin.hh.
|
protected |
Name of the contact sensor.
Definition at line 59 of file SideContactPlugin.hh.
|
protected |
Subscriber for the contact topic.
Definition at line 81 of file SideContactPlugin.hh.
|
protected |
Pointer to the model.
Definition at line 75 of file SideContactPlugin.hh.
|
mutableprotected |
Mutex for protecting contacts msg.
Definition at line 87 of file SideContactPlugin.hh.
|
protected |
Contacts msg received.
Definition at line 84 of file SideContactPlugin.hh.
|
protected |
Flag for new contacts message.
Definition at line 90 of file SideContactPlugin.hh.
|
protected |
Pointer to this node for publishing/subscribing.
Definition at line 78 of file SideContactPlugin.hh.
|
protected |
Pointer to the sensor's parent's link.
Definition at line 96 of file SideContactPlugin.hh.
|
protected |
Pointer to the contact sensor.
Definition at line 65 of file SideContactPlugin.hh.
|
protected |
Scoped name of the contact sensor.
Definition at line 62 of file SideContactPlugin.hh.
|
protected |
The normal, in local frame, to the side that is to have contacts monitored (default (0, 0, 1))
Definition at line 69 of file SideContactPlugin.hh.
|
protected |
Pointer to the update event connection.
Definition at line 56 of file SideContactPlugin.hh.
|
protected |
Pointer to the world.
Definition at line 72 of file SideContactPlugin.hh.
The documentation for this class was generated from the following files: