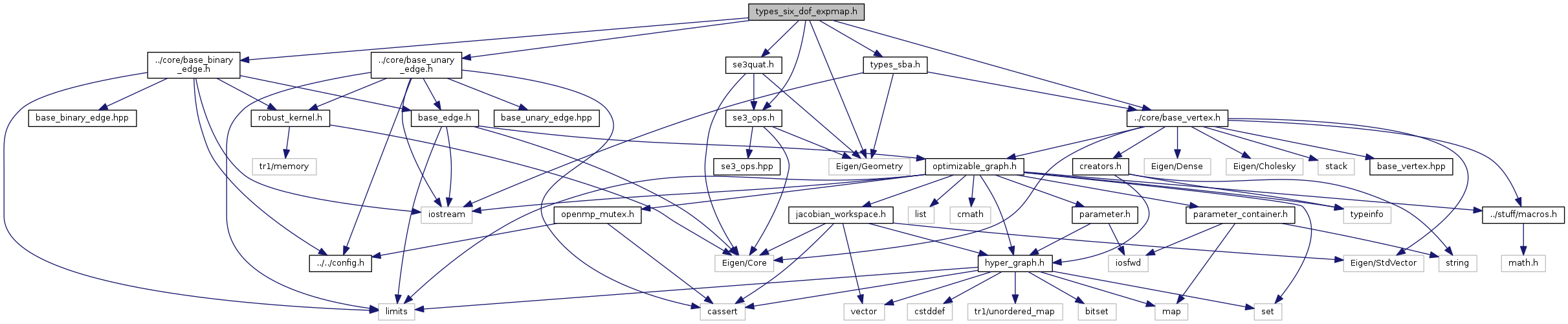
#include "../core/base_vertex.h"#include "../core/base_binary_edge.h"#include "../core/base_unary_edge.h"#include "se3_ops.h"#include "se3quat.h"#include "types_sba.h"#include <Eigen/Geometry>
Include dependency graph for types_six_dof_expmap.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | g2o::EdgeSE3ProjectXYZ |
| class | g2o::EdgeSE3ProjectXYZOnlyPose |
| class | g2o::EdgeStereoSE3ProjectXYZ |
| class | g2o::EdgeStereoSE3ProjectXYZOnlyPose |
| class | g2o::VertexSE3Expmap |
| SE3 Vertex parameterized internally with a transformation matrix and externally with its exponential map. More... | |
Namespaces | |
| g2o | |
| g2o::types_six_dof_expmap | |
Typedefs | |
| typedef Matrix< double, 6, 6 > | g2o::Matrix6d |
Functions | |
| void | g2o::types_six_dof_expmap::init () |