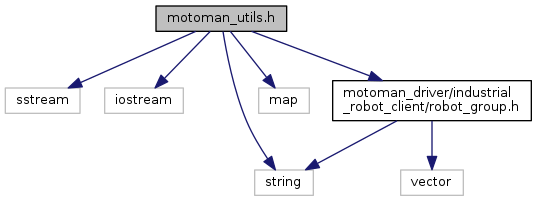
#include <sstream>#include <iostream>#include <string>#include <map>#include "motoman_driver/industrial_robot_client/robot_group.h"
Include dependency graph for motoman_utils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| industrial_robot_client | |
| industrial_robot_client::motoman_utils | |
Functions | |
| bool | industrial_robot_client::motoman_utils::getJointGroups (const std::string topic_param, std::map< int, RobotGroup > &robot_groups) |
| Parses multi-group joints from topic_param. More... | |