Header file file for the declaration of the function TypeIIRMLMath::Step2WithoutSynchronization(). More...
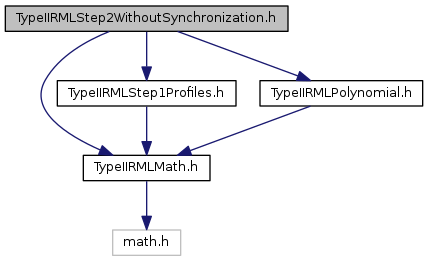
Include dependency graph for TypeIIRMLStep2WithoutSynchronization.h:
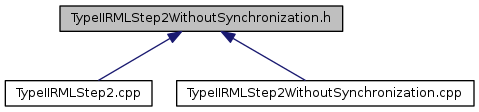
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| TypeIIRMLMath | |
Functions | |
| void | TypeIIRMLMath::Step2WithoutSynchronization (const double &CurrentPosition, const double &CurrentVelocity, const double &TargetPosition, const double &TargetVelocity, const double &MaxVelocity, const double &MaxAcceleration, const TypeIIRMLMath::Step1_Profile &UsedProfile, const double &MinimumExecutionTime, MotionPolynomials *PolynomialsInternal) |
| This function contains sets of trajectory parameters (i.e., all polynomial coefficients) in the case of non-synchronized trajectories. More... | |
Detailed Description
Header file file for the declaration of the function TypeIIRMLMath::Step2WithoutSynchronization().
Header file for the function TypeIIRMLMath::Step2WithoutSynchronization(), which sets up all polynomial parameters in the case of non-synchronized trajectories (cf. RMLFlags::NO_SYNCHRONIZATION).
The function is part of the namespace TypeIIRMLMath.
- Date
- March 2014
- Version
- 1.2.6
- Copyright
- Copyright (C) 2014 Google, Inc.
GNU Lesser General Public License
This file is part of the Type II Reflexxes Motion Library.
The Type II Reflexxes Motion Library is free software: you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
The Type II Reflexxes Motion Library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License along with the Type II Reflexxes Motion Library. If not, see http://www.gnu.org/licenses/.
Definition in file TypeIIRMLStep2WithoutSynchronization.h.