#include <cmath>#include "unit-tests-common.h"#include "../include/librealsense2/rs_advanced_mode.hpp"#include <librealsense2/hpp/rs_frame.hpp>#include <iostream>#include <chrono>#include <ctime>#include <algorithm>#include <librealsense2/rsutil.h>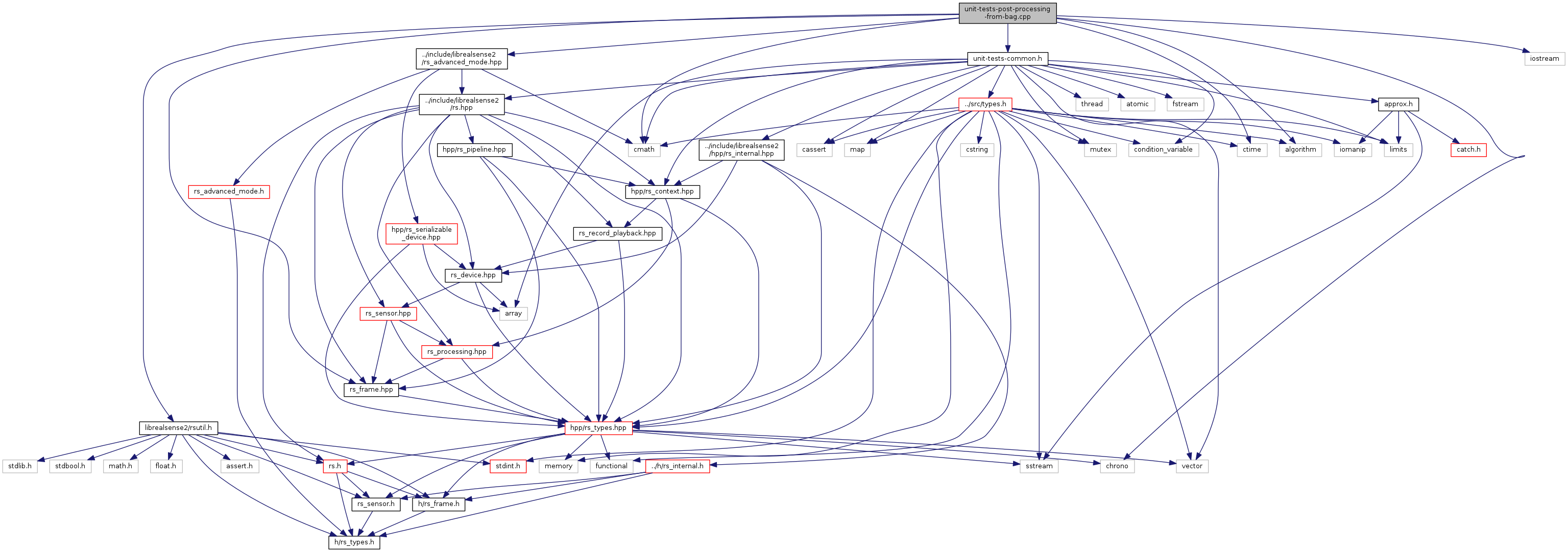
Go to the source code of this file.
Classes | |
| struct | _sw_context |
| class | align_record_block |
| class | pointcloud_record_block |
| class | processing_recordable_block |
Macros | |
| #define | SECTION_FROM_TEST_NAME space_to_underscore(Catch::getCurrentContext().getResultCapture()->getCurrentTestName()).c_str() |
Typedefs | |
| typedef struct _sw_context | sw_context |
Macro Definition Documentation
| #define SECTION_FROM_TEST_NAME space_to_underscore(Catch::getCurrentContext().getResultCapture()->getCurrentTestName()).c_str() |
Definition at line 17 of file unit-tests-post-processing-from-bag.cpp.
Typedef Documentation
| typedef struct _sw_context sw_context |
Function Documentation
| void compare_processed_frames_vs_recorded_frames | ( | processing_recordable_block & | record_block, |
| std::string | file | ||
| ) |
Definition at line 359 of file unit-tests-post-processing-from-bag.cpp.
| rs2_software_video_frame create_sw_frame | ( | const rs2::video_frame & | f, |
| rs2::stream_profile | profile | ||
| ) |
Definition at line 28 of file unit-tests-post-processing-from-bag.cpp.
| std::vector<rs2::frameset> get_composite_frames | ( | std::vector< rs2::sensor > | sensors | ) |
Definition at line 185 of file unit-tests-post-processing-from-bag.cpp.
| std::vector<rs2::frame> get_frames | ( | std::vector< rs2::sensor > | sensors | ) |
Definition at line 231 of file unit-tests-post-processing-from-bag.cpp.
| std::string get_sensor_name | ( | rs2::video_stream_profile | c, |
| rs2::video_stream_profile | d | ||
| ) |
Definition at line 113 of file unit-tests-post-processing-from-bag.cpp.
| rs2::stream_profile init_stream_profile | ( | std::shared_ptr< rs2::software_sensor > | ss, |
| rs2::video_stream_profile | stream_profile | ||
| ) |
Definition at line 121 of file unit-tests-post-processing-from-bag.cpp.
| std::vector<rs2::stream_profile> init_stream_profiles | ( | sw_context & | sctx, |
| std::shared_ptr< rs2::software_sensor > | ss, | ||
| std::string | sensor_name, | ||
| rs2::video_stream_profile | c, | ||
| rs2::video_stream_profile | d | ||
| ) |
Definition at line 138 of file unit-tests-post-processing-from-bag.cpp.
| sw_context init_sw_device | ( | std::vector< rs2::video_stream_profile > | depth_profiles, |
| std::vector< rs2::video_stream_profile > | color_profiles, | ||
| float | depth_units | ||
| ) |
Definition at line 149 of file unit-tests-post-processing-from-bag.cpp.
| sw_context init_sw_device | ( | std::vector< std::string > | sensor_names, |
| std::vector< rs2::frame > | processed_frames | ||
| ) |
Definition at line 258 of file unit-tests-post-processing-from-bag.cpp.
| void record_frames_all_res | ( | processing_recordable_block & | record_block, |
| std::string | file | ||
| ) |
Definition at line 281 of file unit-tests-post-processing-from-bag.cpp.
| void record_sw_frame | ( | std::string | sensor_name, |
| rs2::frameset | fs, | ||
| sw_context | sctx | ||
| ) |
Definition at line 176 of file unit-tests-post-processing-from-bag.cpp.
| TEST_CASE | ( | "Record software-device all resolutions" | , |
| "" | [record-bag] | ||
| ) |
Definition at line 413 of file unit-tests-post-processing-from-bag.cpp.
| TEST_CASE | ( | "Record align color to depth software-device all resolutions" | , |
| "" | [record-bag][align] | ||
| ) |
Definition at line 491 of file unit-tests-post-processing-from-bag.cpp.
| TEST_CASE | ( | "Record align depth to color software-device all resolutions" | , |
| "" | [record-bag][align] | ||
| ) |
Definition at line 497 of file unit-tests-post-processing-from-bag.cpp.
| TEST_CASE | ( | "Record point cloud software-device all resolutions" | , |
| "" | [record-bag][point-cloud] | ||
| ) |
Definition at line 503 of file unit-tests-post-processing-from-bag.cpp.
Definition at line 509 of file unit-tests-post-processing-from-bag.cpp.
Definition at line 515 of file unit-tests-post-processing-from-bag.cpp.
| TEST_CASE | ( | "Test point cloud from recording" | , |
| "" | [software-device][point-cloud] | ||
| ) |
Definition at line 521 of file unit-tests-post-processing-from-bag.cpp.
| void validate_ppf_results | ( | const rs2::frame & | result_frame, |
| const rs2::frame & | reference_frame | ||
| ) |
Definition at line 333 of file unit-tests-post-processing-from-bag.cpp.