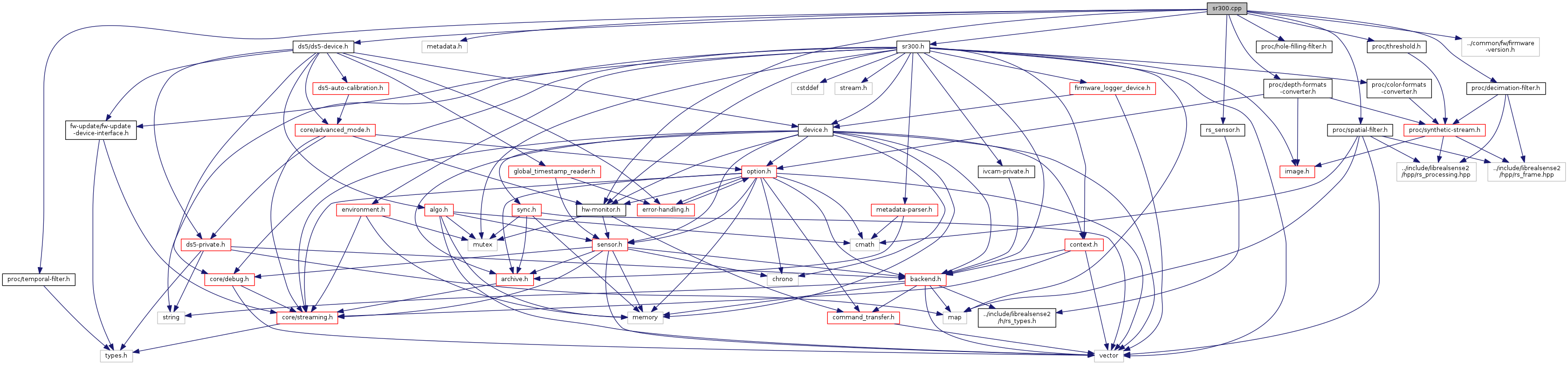
#include "sr300.h"#include "metadata.h"#include "hw-monitor.h"#include "proc/decimation-filter.h"#include "proc/threshold.h"#include "proc/spatial-filter.h"#include "proc/temporal-filter.h"#include "proc/hole-filling-filter.h"#include "proc/depth-formats-converter.h"#include "ds5/ds5-device.h"#include "../../include/librealsense2/h/rs_sensor.h"#include "../common/fw/firmware-version.h"
Include dependency graph for sr300.cpp:
Go to the source code of this file.
Classes | |
| struct | librealsense::sr300_raw_calibration |
Namespaces | |
| librealsense | |
Enumerations | |
| enum | librealsense::cam_data_source : uint32_t { librealsense::cam_data_source::TakeFromRO = 0, librealsense::cam_data_source::TakeFromRW = 1, librealsense::cam_data_source::TakeFromRAM = 2 } |
Variables | |
| std::map< uint32_t, rs2_format > | librealsense::sr300_color_fourcc_to_rs2_format |
| std::map< uint32_t, rs2_stream > | librealsense::sr300_color_fourcc_to_rs2_stream |
| std::map< uint32_t, rs2_format > | librealsense::sr300_depth_fourcc_to_rs2_format |
| std::map< uint32_t, rs2_stream > | librealsense::sr300_depth_fourcc_to_rs2_stream |