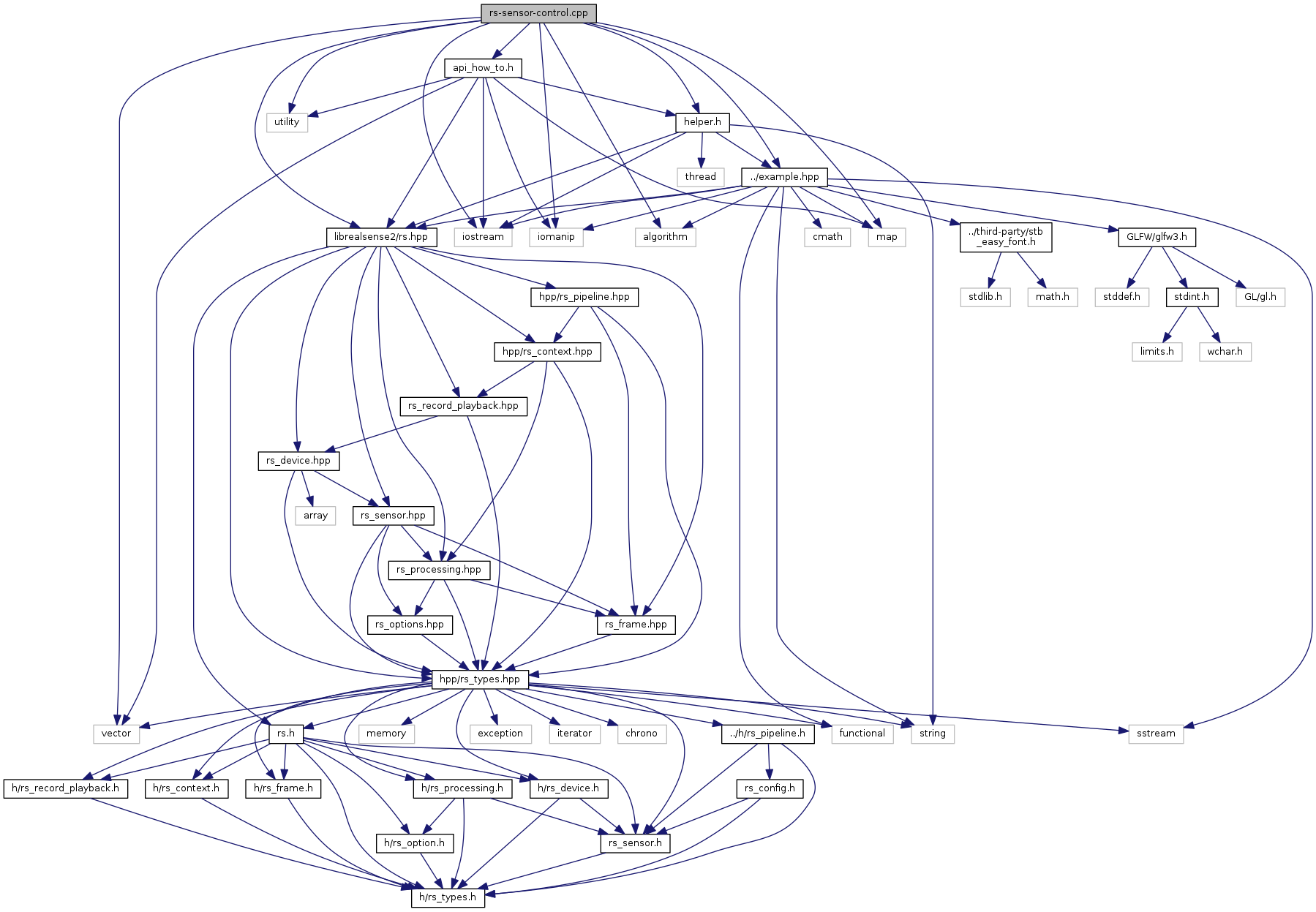
#include <iostream>#include <iomanip>#include <map>#include <utility>#include <vector>#include <librealsense2/rs.hpp>#include <algorithm>#include "../example.hpp"#include "api_how_to.h"#include "helper.h"
Include dependency graph for rs-sensor-control.cpp:
Go to the source code of this file.
Typedefs | |
| using | sensor_action = std::pair< std::function< void(rs2::device, rs2::sensor)>, std::string > |
Functions | |
| void | control_sensor_options (rs2::device device, rs2::sensor sensor) |
| std::vector< sensor_action > | create_sensor_actions () |
| void | display_live_stream (rs2::device device, rs2::sensor sensor) |
| int | main (int argc, char *argv[]) |
| void | show_extrinsics_between_streams (rs2::device device, rs2::sensor sensor) |
| void | show_stream_intrinsics (rs2::device device, rs2::sensor sensor) |
Typedef Documentation
| using sensor_action = std::pair<std::function<void(rs2::device, rs2::sensor)>, std::string> |
Definition at line 17 of file rs-sensor-control.cpp.
Function Documentation
| void control_sensor_options | ( | rs2::device | device, |
| rs2::sensor | sensor | ||
| ) |
Definition at line 93 of file rs-sensor-control.cpp.
| std::vector< sensor_action > create_sensor_actions | ( | ) |
Definition at line 127 of file rs-sensor-control.cpp.
| void display_live_stream | ( | rs2::device | device, |
| rs2::sensor | sensor | ||
| ) |
Definition at line 99 of file rs-sensor-control.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 20 of file rs-sensor-control.cpp.
| void show_extrinsics_between_streams | ( | rs2::device | device, |
| rs2::sensor | sensor | ||
| ) |
Definition at line 114 of file rs-sensor-control.cpp.
| void show_stream_intrinsics | ( | rs2::device | device, |
| rs2::sensor | sensor | ||
| ) |
Definition at line 108 of file rs-sensor-control.cpp.