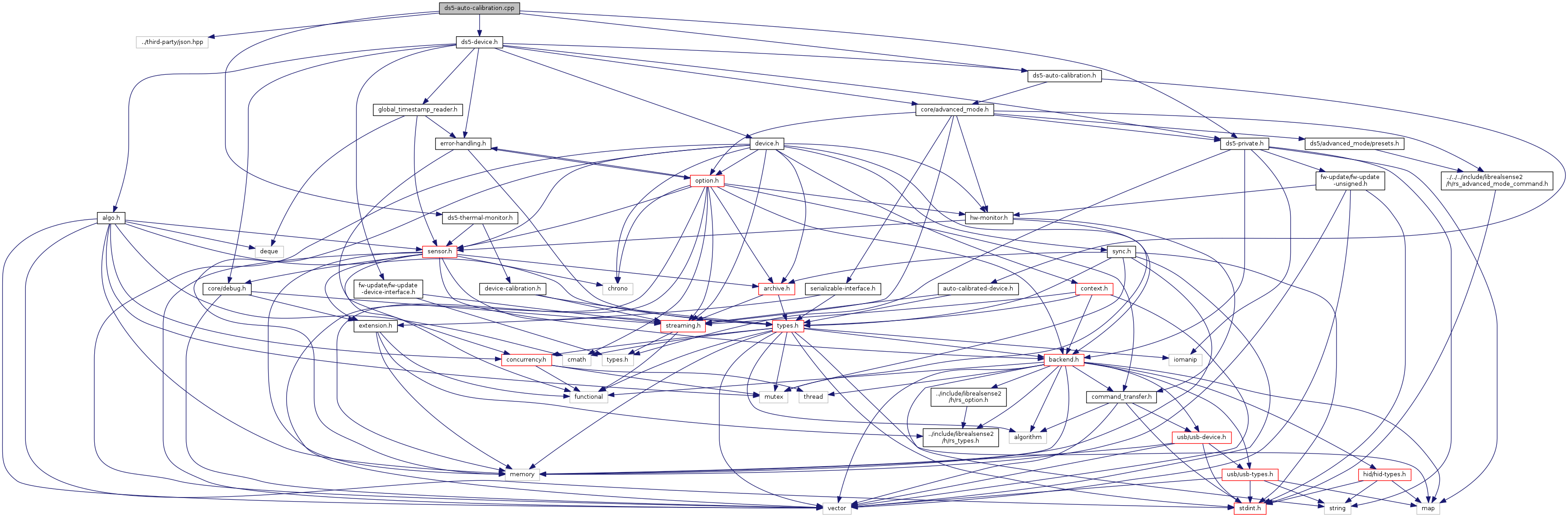
#include "../third-party/json.hpp"
#include "ds5-device.h"
#include "ds5-private.h"
#include "ds5-thermal-monitor.h"
#include "ds5-auto-calibration.h"
Go to the source code of this file.
|
| enum | librealsense::auto_calib_speed {
librealsense::speed_very_fast = 0,
librealsense::speed_fast = 1,
librealsense::speed_medium = 2,
librealsense::speed_slow = 3,
librealsense::speed_white_wall = 4
} |
| |
| enum | librealsense::auto_calib_sub_cmd : uint8_t {
librealsense::py_rx_calib_begin = 0x08,
librealsense::py_rx_calib_check_status = 0x03,
librealsense::tare_calib_begin = 0x0b,
librealsense::tare_calib_check_status = 0x0c,
librealsense::get_calibration_result = 0x0d,
librealsense::focal_length_calib_begin = 0x11,
librealsense::get_focal_legth_calib_result = 0x12,
librealsense::py_rx_plus_fl_calib_begin = 0x13,
librealsense::get_py_rx_plus_fl_calib_result = 0x14,
librealsense::set_coefficients = 0x19
} |
| |
| enum | librealsense::data_sampling { librealsense::polling = 0,
librealsense::interrupt = 1
} |
| |
| enum | librealsense::rs2_dsc_status : uint16_t {
librealsense::RS2_DSC_STATUS_SUCCESS = 0,
librealsense::RS2_DSC_STATUS_RESULT_NOT_READY = 1,
librealsense::RS2_DSC_STATUS_FILL_FACTOR_TOO_LOW = 2,
librealsense::RS2_DSC_STATUS_EDGE_TOO_CLOSE = 3,
librealsense::RS2_DSC_STATUS_NOT_CONVERGE = 4,
librealsense::RS2_DSC_STATUS_BURN_SUCCESS = 5,
librealsense::RS2_DSC_STATUS_BURN_ERROR = 6,
librealsense::RS2_DSC_STATUS_NO_DEPTH_AVERAGE = 7
} |
| |
| enum | librealsense::scan_parameter { librealsense::py_scan = 0,
librealsense::rx_scan = 1
} |
| |
| enum | librealsense::subpixel_accuracy { librealsense::very_high = 0,
librealsense::high = 1,
librealsense::medium = 2,
librealsense::low = 3
} |
| |