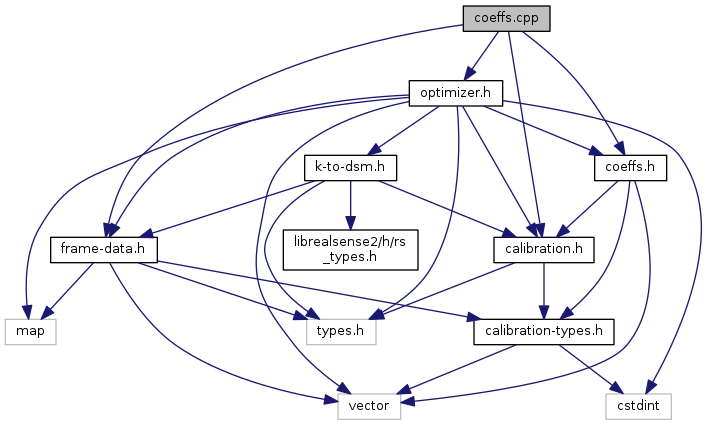
Include dependency graph for coeffs.cpp:
Go to the source code of this file.
Namespaces | |
| librealsense | |
| librealsense::algo | |
| librealsense::algo::depth_to_rgb_calibration | |
Functions | |
| coeffs< p_matrix > | librealsense::algo::depth_to_rgb_calibration::calc_p_coefs (const z_frame_data &z_data, const std::vector< double3 > &new_vertices, const yuy2_frame_data &yuy_data, const calib &cal, const p_matrix &p_mat, const std::vector< double > &rc, const std::vector< double2 > &xy) |
| coeffs< rotation_in_angles > | librealsense::algo::depth_to_rgb_calibration::calc_rotation_coefs (const z_frame_data &z_data, const yuy2_frame_data &yuy_data, const calib &yuy_intrin_extrin, const std::vector< double > &rc, const std::vector< double2 > &xy) |
| p_matrix | librealsense::algo::depth_to_rgb_calibration::calculate_p_x_coeff (double3 const &v, double rc, double2 const &xy, const calib &cal, const p_matrix &p_mat) |
| p_matrix | librealsense::algo::depth_to_rgb_calibration::calculate_p_y_coeff (double3 const &v, double rc, double2 const &xy, const calib &cal, const p_matrix &p_mat) |
| double | librealsense::algo::depth_to_rgb_calibration::calculate_rotation_x_alpha_coeff (rotation_in_angles const &rot_angles, double3 const &v, double rc, double2 const &xy, const calib &yuy_intrin_extrin) |
| static double | librealsense::algo::depth_to_rgb_calibration::calculate_rotation_x_beta_coeff (rotation_in_angles const &rot_angles, double3 const &v, double rc, double2 const &xy, const calib &yuy_intrin_extrin) |
| double | librealsense::algo::depth_to_rgb_calibration::calculate_rotation_x_gamma_coeff (rotation_in_angles const &rot_angles, double3 const &v, double rc, double2 const &xy, const calib &yuy_intrin_extrin) |
| double | librealsense::algo::depth_to_rgb_calibration::calculate_rotation_y_alpha_coeff (rotation_in_angles const &rot_angles, double3 const &v, double rc, double2 const &xy, const calib &yuy_intrin_extrin) |
| double | librealsense::algo::depth_to_rgb_calibration::calculate_rotation_y_beta_coeff (rotation_in_angles const &rot_angles, double3 const &v, double rc, double2 const &xy, const calib &yuy_intrin_extrin) |
| double | librealsense::algo::depth_to_rgb_calibration::calculate_rotation_y_gamma_coeff (rotation_in_angles const &rot_angles, double3 const &v, double rc, double2 const &xy, const calib &yuy_intrin_extrin) |
| translation | librealsense::algo::depth_to_rgb_calibration::calculate_translation_x_coeff (double3 v, double rc, double2 xy, const calib &yuy_intrin_extrin) |