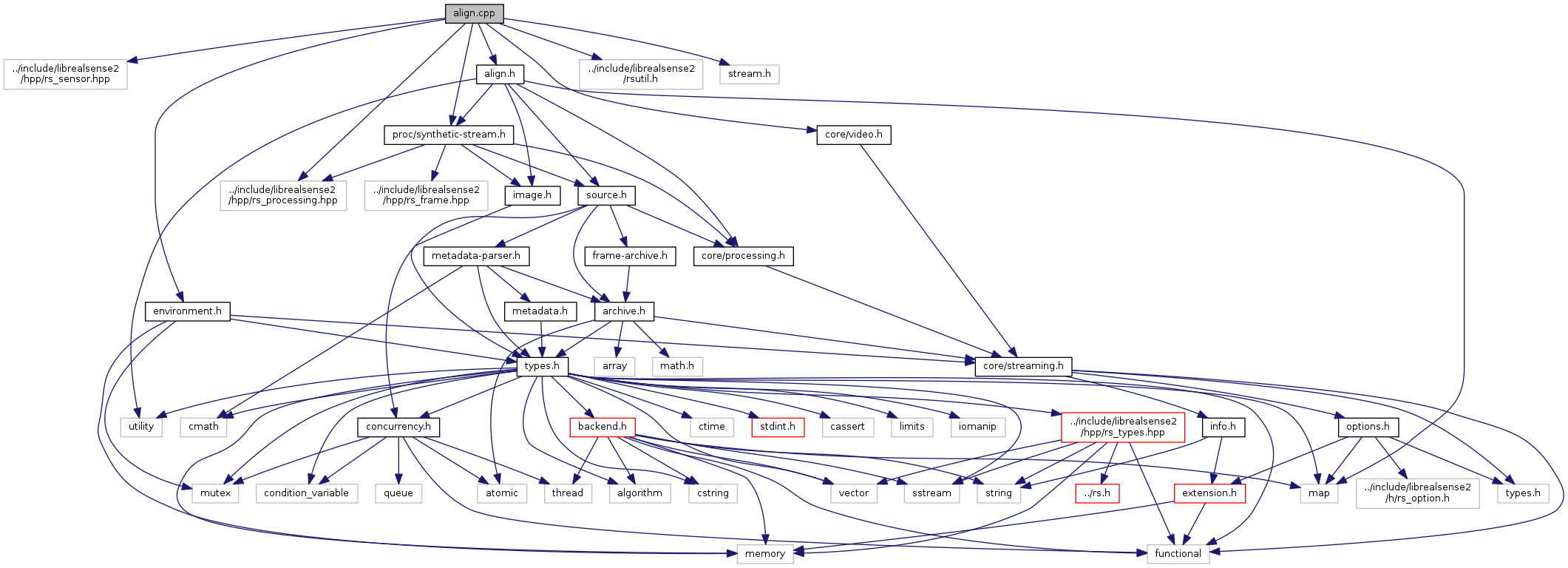
#include "../include/librealsense2/hpp/rs_sensor.hpp"
#include "../include/librealsense2/hpp/rs_processing.hpp"
#include "../include/librealsense2/rsutil.h"
#include "core/video.h"
#include "proc/synthetic-stream.h"
#include "environment.h"
#include "align.h"
#include "stream.h"
Go to the source code of this file.
|
| template<class GET_DEPTH , class TRANSFER_PIXEL > |
| void | librealsense::align_images (const rs2_intrinsics &depth_intrin, const rs2_extrinsics &depth_to_other, const rs2_intrinsics &other_intrin, GET_DEPTH get_depth, TRANSFER_PIXEL transfer_pixel) |
| |
| template<class GET_DEPTH > |
| void | librealsense::align_other_to_depth (byte *other_aligned_to_depth, GET_DEPTH get_depth, const rs2_intrinsics &depth_intrin, const rs2_extrinsics &depth_to_other, const rs2_intrinsics &other_intrin, const byte *other_pixels, rs2_format other_format) |
| |
| template<int N, class GET_DEPTH > |
| void | librealsense::align_other_to_depth_bytes (byte *other_aligned_to_depth, GET_DEPTH get_depth, const rs2_intrinsics &depth_intrin, const rs2_extrinsics &depth_to_other, const rs2_intrinsics &other_intrin, const byte *other_pixels) |
| |