Simple module for the diff drive odometry. More...
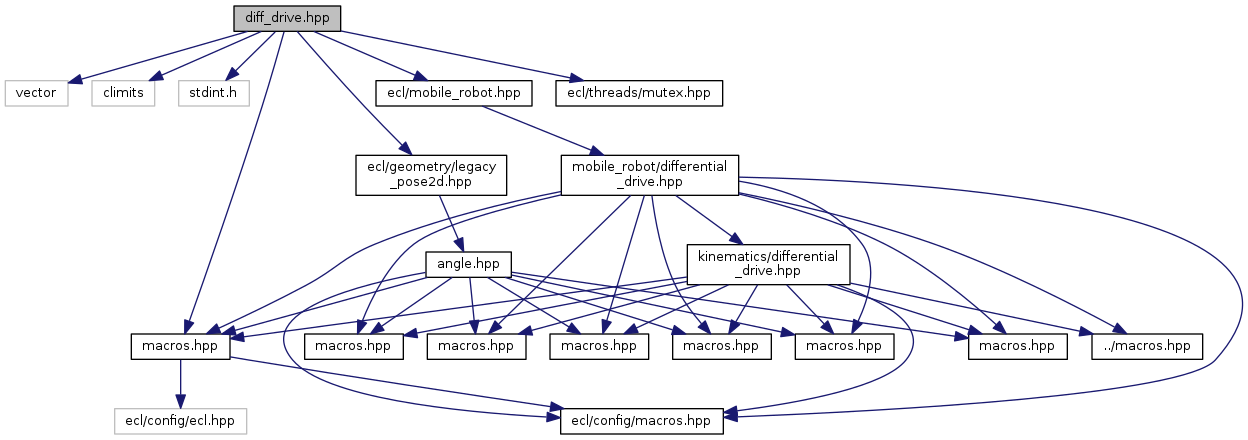
#include <vector>#include <climits>#include <stdint.h>#include <ecl/geometry/legacy_pose2d.hpp>#include <ecl/mobile_robot.hpp>#include <ecl/threads/mutex.hpp>#include "../macros.hpp"
Include dependency graph for diff_drive.hpp:
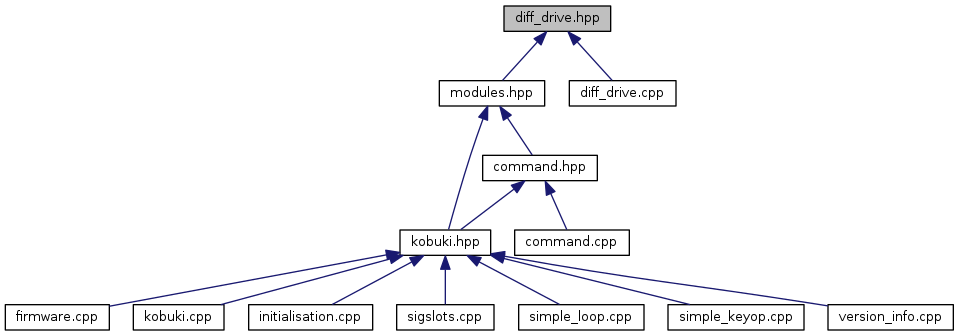
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | kobuki::DiffDrive |
Namespaces | |
| kobuki | |
Detailed Description
Simple module for the diff drive odometry.
License: BSD https://raw.github.com/yujinrobot/kobuki_core/hydro-devel/kobuki_driver/LICENSE
Definition in file diff_drive.hpp.