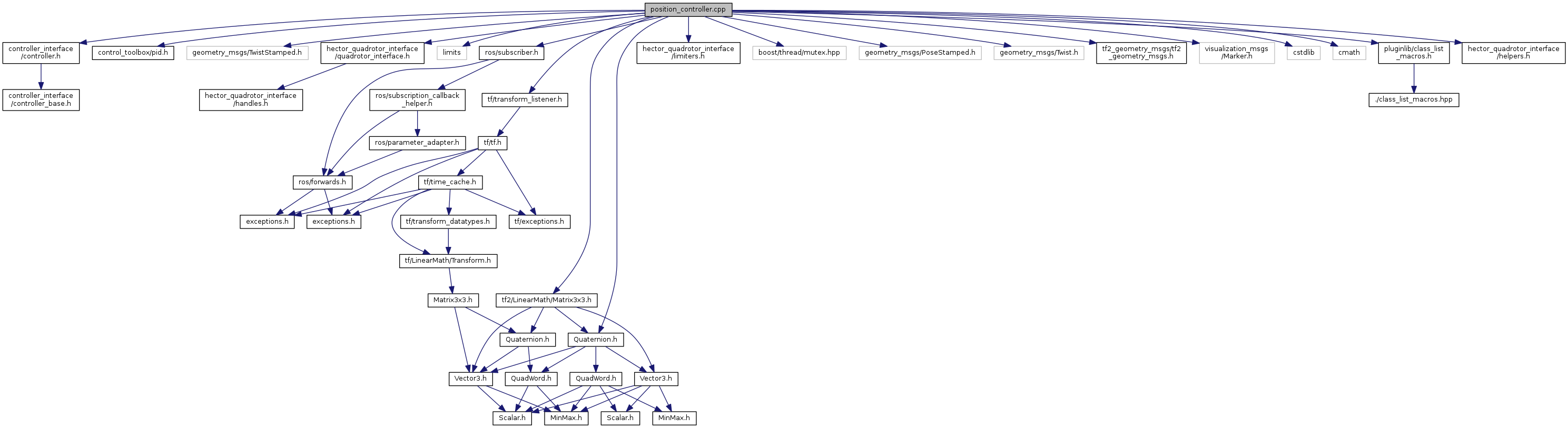
#include <controller_interface/controller.h>#include <control_toolbox/pid.h>#include <geometry_msgs/TwistStamped.h>#include <hector_quadrotor_interface/quadrotor_interface.h>#include <limits>#include <ros/subscriber.h>#include <hector_quadrotor_interface/limiters.h>#include <boost/thread/mutex.hpp>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/Twist.h>#include <tf/transform_listener.h>#include <tf2/LinearMath/Matrix3x3.h>#include <tf2/LinearMath/Quaternion.h>#include <tf2_geometry_msgs/tf2_geometry_msgs.h>#include <visualization_msgs/Marker.h>#include <cstdlib>#include <cmath>#include <pluginlib/class_list_macros.h>#include <hector_quadrotor_interface/helpers.h>
Include dependency graph for position_controller.cpp:
Go to the source code of this file.
Classes | |
| class | hector_quadrotor_controllers::PositionController |
Namespaces | |
| hector_quadrotor_controllers | |