|
| const boost::shared_ptr< CALIBRATION > | calibration () const |
| |
| Base::Cameras | cameras (const Values &values) const override |
| |
| bool | equals (const NonlinearFactor &p, double tol=1e-9) const override |
| | equals More...
|
| |
| double | error (const Values &values) const override |
| |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| |
| | SmartProjectionPoseFactor () |
| |
| | SmartProjectionPoseFactor (const SharedNoiseModel &sharedNoiseModel, const boost::shared_ptr< CALIBRATION > K, const SmartProjectionParams ¶ms=SmartProjectionParams()) |
| |
| | SmartProjectionPoseFactor (const SharedNoiseModel &sharedNoiseModel, const boost::shared_ptr< CALIBRATION > K, const boost::optional< Pose3 > body_P_sensor, const SmartProjectionParams ¶ms=SmartProjectionParams()) |
| |
| | ~SmartProjectionPoseFactor () override |
| |
| void | computeJacobiansWithTriangulatedPoint (std::vector< typename Base::MatrixZD, Eigen::aligned_allocator< typename Base::MatrixZD > > &Fblocks, Matrix &E, Vector &b, const Cameras &cameras) const |
| |
| boost::shared_ptr< RegularHessianFactor< Base::Dim > > | createHessianFactor (const Cameras &cameras, const double lambda=0.0, bool diagonalDamping=false) const |
| | linearize returns a Hessianfactor that is an approximation of error(p) More...
|
| |
| boost::shared_ptr< JacobianFactorQ< Base::Dim, 2 > > | createJacobianQFactor (const Cameras &cameras, double lambda) const |
| | create factor More...
|
| |
| boost::shared_ptr< JacobianFactorQ< Base::Dim, 2 > > | createJacobianQFactor (const Values &values, double lambda) const |
| | Create a factor, takes values. More...
|
| |
| boost::shared_ptr< JacobianFactor > | createJacobianSVDFactor (const Cameras &cameras, double lambda) const |
| | different (faster) way to compute Jacobian factor More...
|
| |
| boost::shared_ptr< RegularImplicitSchurFactor< PinholePose< CALIBRATION > > > | createRegularImplicitSchurFactor (const Cameras &cameras, double lambda) const |
| |
| bool | decideIfTriangulate (const Cameras &cameras) const |
| | Check if the new linearization point is the same as the one used for previous triangulation. More...
|
| |
| bool | equals (const NonlinearFactor &p, double tol=1e-9) const override |
| | equals More...
|
| |
| double | error (const Values &values) const override |
| | Calculate total reprojection error. More...
|
| |
| bool | isDegenerate () const |
| |
| bool | isFarPoint () const |
| |
| bool | isOutlier () const |
| |
| bool | isPointBehindCamera () const |
| |
| bool | isValid () const |
| | Is result valid? More...
|
| |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &values) const override |
| | linearize More...
|
| |
| boost::shared_ptr< GaussianFactor > | linearizeDamped (const Cameras &cameras, const double lambda=0.0) const |
| |
| boost::shared_ptr< GaussianFactor > | linearizeDamped (const Values &values, const double lambda=0.0) const |
| |
| virtual boost::shared_ptr< RegularHessianFactor< Base::Dim > > | linearizeToHessian (const Values &values, double lambda=0.0) const |
| | linearize to a Hessianfactor More...
|
| |
| virtual boost::shared_ptr< RegularImplicitSchurFactor< PinholePose< CALIBRATION > > > | linearizeToImplicit (const Values &values, double lambda=0.0) const |
| | linearize to an Implicit Schur factor More...
|
| |
| virtual boost::shared_ptr< JacobianFactorQ< Base::Dim, 2 > > | linearizeToJacobian (const Values &values, double lambda=0.0) const |
| | linearize to a JacobianfactorQ More...
|
| |
| TriangulationResult | point () const |
| |
| TriangulationResult | point (const Values &values) const |
| |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| |
| Vector | reprojectionErrorAfterTriangulation (const Values &values) const |
| | Calculate vector of re-projection errors, before applying noise model. More...
|
| |
| | SmartProjectionFactor () |
| |
| | SmartProjectionFactor (const SharedNoiseModel &sharedNoiseModel, const SmartProjectionParams ¶ms=SmartProjectionParams()) |
| |
| double | totalReprojectionError (const Cameras &cameras, boost::optional< Point3 > externalPoint=boost::none) const |
| |
| bool | triangulateAndComputeE (Matrix &E, const Cameras &cameras) const |
| |
| bool | triangulateAndComputeE (Matrix &E, const Values &values) const |
| |
| bool | triangulateAndComputeJacobians (std::vector< typename Base::MatrixZD, Eigen::aligned_allocator< typename Base::MatrixZD > > &Fblocks, Matrix &E, Vector &b, const Values &values) const |
| | Version that takes values, and creates the point. More...
|
| |
| bool | triangulateAndComputeJacobiansSVD (std::vector< typename Base::MatrixZD, Eigen::aligned_allocator< typename Base::MatrixZD > > &Fblocks, Matrix &Enull, Vector &b, const Values &values) const |
| | takes values More...
|
| |
| bool | triangulateForLinearize (const Cameras &cameras) const |
| | triangulate More...
|
| |
| TriangulationResult | triangulateSafe (const Cameras &cameras) const |
| | triangulateSafe More...
|
| |
| | ~SmartProjectionFactor () override |
| |
| void | add (const Z &measured, const Key &key) |
| |
| void | add (const ZVector &measurements, const KeyVector &cameraKeys) |
| |
| void | add (const SFM_TRACK &trackToAdd) |
| |
| Pose3 | body_P_sensor () const |
| |
| void | computeJacobians (FBlocks &Fs, Matrix &E, Vector &b, const Cameras &cameras, const POINT &point) const |
| |
| void | computeJacobiansSVD (FBlocks &Fs, Matrix &Enull, Vector &b, const Cameras &cameras, const POINT &point) const |
| | SVD version. More...
|
| |
| virtual void | correctForMissingMeasurements (const Cameras &cameras, Vector &ue, boost::optional< typename Cameras::FBlocks & > Fs=boost::none, boost::optional< Matrix & > E=boost::none) const |
| |
| boost::shared_ptr< RegularHessianFactor< Dim > > | createHessianFactor (const Cameras &cameras, const Point3 &point, const double lambda=0.0, bool diagonalDamping=false) const |
| | Linearize to a Hessianfactor. More...
|
| |
| boost::shared_ptr< JacobianFactorQ< Dim, ZDim > > | createJacobianQFactor (const Cameras &cameras, const Point3 &point, double lambda=0.0, bool diagonalDamping=false) const |
| |
| boost::shared_ptr< JacobianFactor > | createJacobianSVDFactor (const Cameras &cameras, const Point3 &point, double lambda=0.0) const |
| |
| boost::shared_ptr< RegularImplicitSchurFactor< PinholePose< CALIBRATION > > > | createRegularImplicitSchurFactor (const Cameras &cameras, const Point3 &point, double lambda=0.0, bool diagonalDamping=false) const |
| | Return Jacobians as RegularImplicitSchurFactor with raw access. More...
|
| |
| size_t | dim () const override |
| | get the dimension (number of rows!) of the factor More...
|
| |
| const ZVector & | measured () const |
| |
| | SmartFactorBase () |
| | Default Constructor, for serialization. More...
|
| |
| | SmartFactorBase (const SharedNoiseModel &sharedNoiseModel, boost::optional< Pose3 > body_P_sensor=boost::none, size_t expectedNumberCameras=10) |
| | Constructor. More...
|
| |
| double | totalReprojectionError (const Cameras &cameras, const POINT &point) const |
| |
| Vector | unwhitenedError (const Cameras &cameras, const POINT &point, boost::optional< typename Cameras::FBlocks & > Fs=boost::none, boost::optional< Matrix & > E=boost::none) const |
| |
| void | updateAugmentedHessian (const Cameras &cameras, const Point3 &point, const double lambda, bool diagonalDamping, SymmetricBlockMatrix &augmentedHessian, const KeyVector allKeys) const |
| |
| Vector | whitenedError (const Cameras &cameras, const POINT &point) const |
| |
| void | whitenJacobians (FBlocks &F, Matrix &E, Vector &b) const |
| | Whiten the Jacobians computed by computeJacobians using noiseModel_. More...
|
| |
| | ~SmartFactorBase () override |
| | Virtual destructor, subclasses from NonlinearFactor. More...
|
| |
| | NonlinearFactor () |
| |
| template<typename CONTAINER > |
| | NonlinearFactor (const CONTAINER &keys) |
| |
| virtual | ~NonlinearFactor () |
| |
| virtual bool | active (const Values &) const |
| |
| virtual shared_ptr | clone () const |
| |
| shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| |
| shared_ptr | rekey (const KeyVector &new_keys) const |
| |
| virtual | ~Factor ()=default |
| | Default destructor. More...
|
| |
| Key | front () const |
| | First key. More...
|
| |
| Key | back () const |
| | Last key. More...
|
| |
| const_iterator | find (Key key) const |
| | find More...
|
| |
| const KeyVector & | keys () const |
| | Access the factor's involved variable keys. More...
|
| |
| const_iterator | begin () const |
| |
| const_iterator | end () const |
| |
| size_t | size () const |
| |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| | print only keys More...
|
| |
| KeyVector & | keys () |
| |
| iterator | begin () |
| |
| iterator | end () |
| |
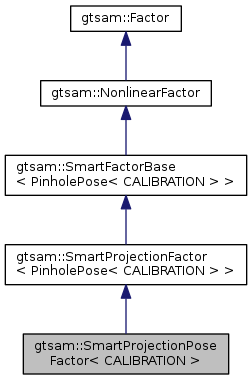
template<class CALIBRATION>
class gtsam::SmartProjectionPoseFactor< CALIBRATION >
Definition at line 45 of file SmartProjectionPoseFactor.h.
 Public Types inherited from gtsam::SmartProjectionFactor< PinholePose< CALIBRATION > >
Public Types inherited from gtsam::SmartProjectionFactor< PinholePose< CALIBRATION > >