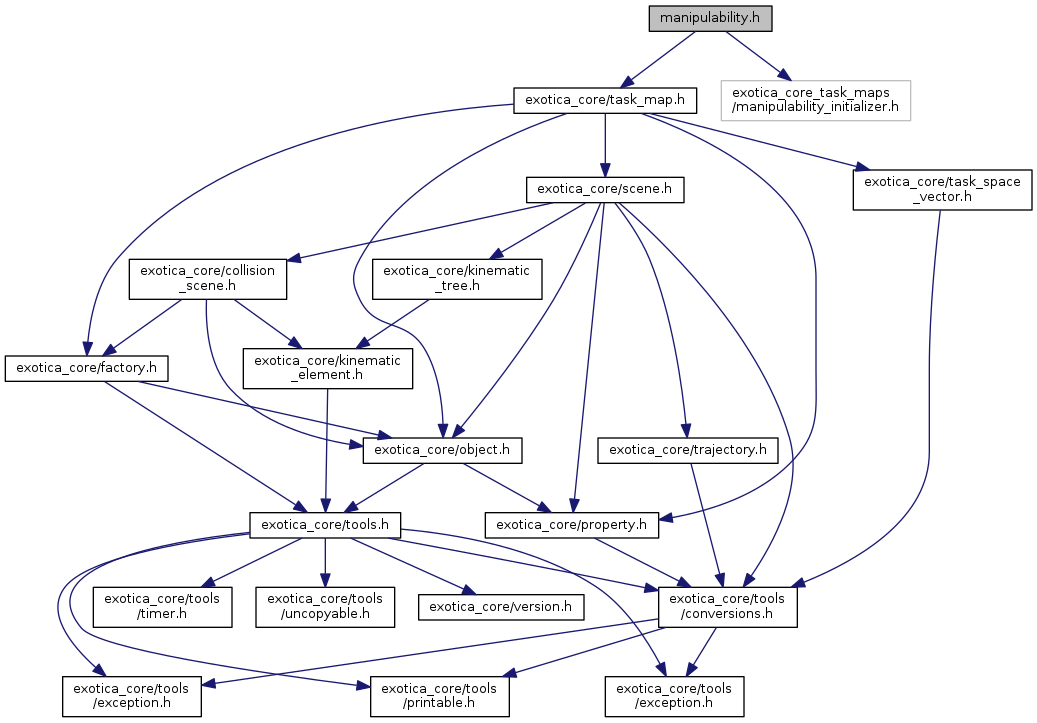
Include dependency graph for manipulability.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | exotica::Manipulability |
| Manipulability measure. The manipulability measure for a robot at a given joint configuration indicates dexterity, that is, how isotropic the robot's motion is with respect to the task space motion. The measure is high when the manipulator is capable of equal motion in all directions and low when the manipulator is close to a singularity. This task map implements Yoshikawa's manipulability measure
that is based on the shape of the velocity ellipsoid where
. More... | |
![\[ m(x) = \sqrt{J(x)J(x)^T} \]](form_17.png)
 is the manipulator Jacobian matrix.. The task map is expressed by
is the manipulator Jacobian matrix.. The task map is expressed by ![\[ \phi(x) := -m(x). \]](form_19.png)
Namespaces | |
| exotica | |