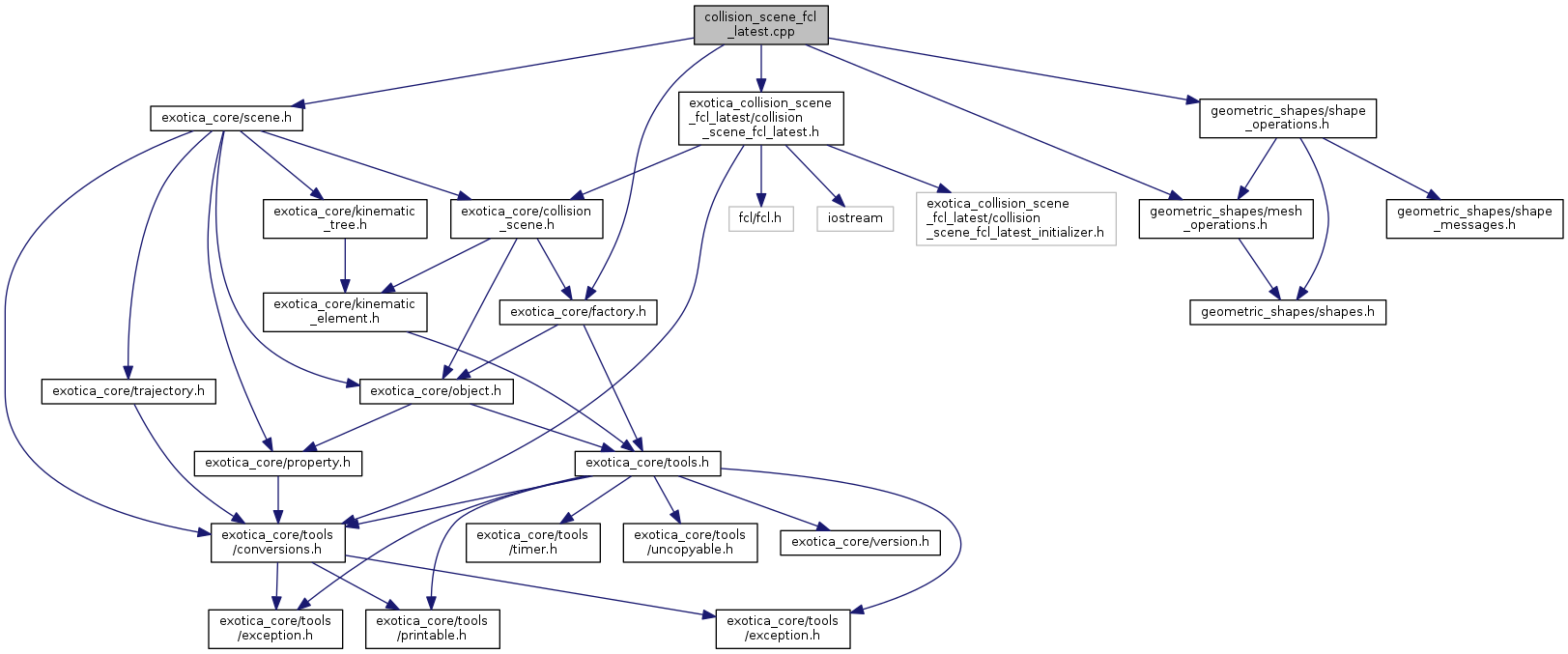
#include <exotica_collision_scene_fcl_latest/collision_scene_fcl_latest.h>#include <exotica_core/factory.h>#include <exotica_core/scene.h>#include <geometric_shapes/mesh_operations.h>#include <geometric_shapes/shape_operations.h>
Include dependency graph for collision_scene_fcl_latest.cpp:
Go to the source code of this file.
Namespaces | |
| exotica | |
Macros | |
| #define | CONTINUOUS_COLLISION_USE_ADVANCED_SETTINGS |
Functions | |
| bool | exotica::IsRobotLink (std::shared_ptr< KinematicElement > e) |
| void | exotica::transformFCLToKDL (const fcl::Transform3d &tf, KDL::Frame &frame) |
| fcl::Transform3d | exotica::transformKDLToFCL (const KDL::Frame &frame) |
Macro Definition Documentation
| #define CONTINUOUS_COLLISION_USE_ADVANCED_SETTINGS |
Definition at line 39 of file collision_scene_fcl_latest.cpp.