#include <tf2_ros/transform_broadcaster.h>#include <tf2_geometry_msgs/tf2_geometry_msgs.h>#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/TransformStamped.h>#include <string>#include <tf2_ros/buffer.h>#include <tf2/LinearMath/Transform.h>#include "nxLib.h"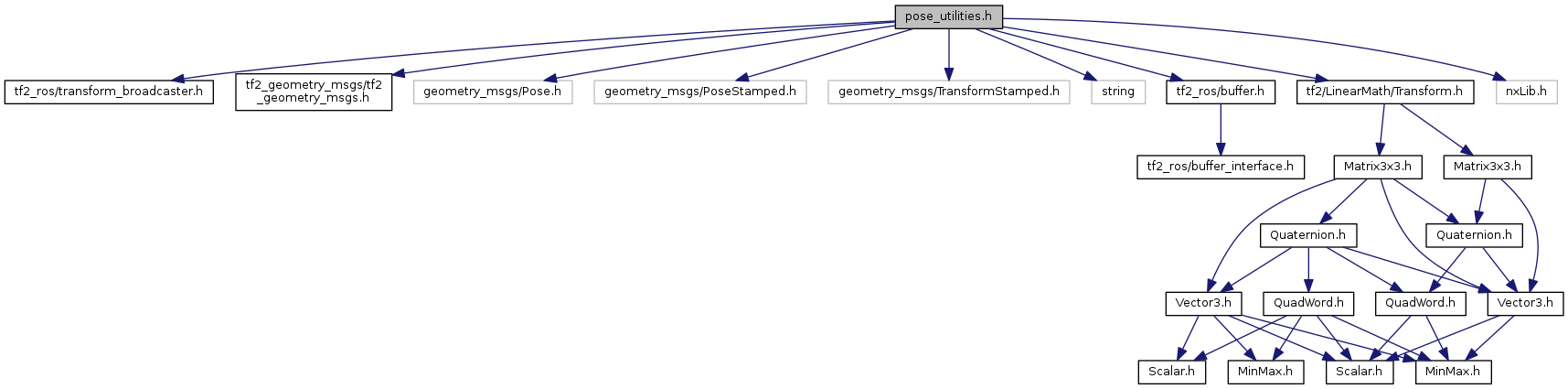

Go to the source code of this file.
Functions | |
| tf2::Transform | fromMsg (geometry_msgs::Transform const &transform) |
| tf2::Transform | fromMsg (geometry_msgs::Pose const &pose) |
| tf2::Transform | fromStampedMessage (geometry_msgs::TransformStamped const &transform) |
| tf2::Transform | fromStampedMessage (geometry_msgs::PoseStamped const &pose) |
| geometry_msgs::TransformStamped | fromTfTransform (tf2::Transform const &transform, std::string parentFrame, std::string childFrame) |
| tf2::Transform | getLatestTransform (tf2_ros::Buffer const &tfBuffer, std::string const &cameraFrame, std::string const &targetFrame) |
| bool | isValid (tf2::Transform const &pose) |
| bool | isValid (geometry_msgs::Transform const &pose) |
| bool | isValid (tf2::Vector3 const &vector) |
| tf2::Transform | poseFromNxLib (NxLibItem const &node) |
| geometry_msgs::TransformStamped | poseFromNxLib (NxLibItem const &node, std::string const &parentFrame, std::string const &childFrame) |
| geometry_msgs::Pose | poseFromTransform (tf2::Transform const &transform) |
| geometry_msgs::PoseStamped | stampedPoseFromTransform (geometry_msgs::TransformStamped const &transform) |
| geometry_msgs::TransformStamped | transformFromPose (geometry_msgs::PoseStamped const &pose, std::string const &childFrame) |
| void | writePoseToNxLib (tf2::Transform const &pose, NxLibItem const &node) |
Function Documentation
| tf2::Transform fromMsg | ( | geometry_msgs::Transform const & | transform | ) |
Creates a tf2::Transform out of pose or transform message type.
Definition at line 167 of file pose_utilities.cpp.
| tf2::Transform fromMsg | ( | geometry_msgs::Pose const & | pose | ) |
Definition at line 180 of file pose_utilities.cpp.
| tf2::Transform fromStampedMessage | ( | geometry_msgs::TransformStamped const & | transform | ) |
Definition at line 141 of file pose_utilities.cpp.
| tf2::Transform fromStampedMessage | ( | geometry_msgs::PoseStamped const & | pose | ) |
Definition at line 154 of file pose_utilities.cpp.
| geometry_msgs::TransformStamped fromTfTransform | ( | tf2::Transform const & | transform, |
| std::string | parentFrame, | ||
| std::string | childFrame | ||
| ) |
Definition at line 204 of file pose_utilities.cpp.
| tf2::Transform getLatestTransform | ( | tf2_ros::Buffer const & | tfBuffer, |
| std::string const & | cameraFrame, | ||
| std::string const & | targetFrame | ||
| ) |
Definition at line 217 of file pose_utilities.cpp.
| bool isValid | ( | tf2::Transform const & | pose | ) |
Check whether the given pose is valid, that is, whether it does not contain NaNs.
For example, such an invalid pose is produced by converting an uninitialized geometry_msgs/Pose to a TF pose.
Definition at line 5 of file pose_utilities.cpp.
| bool isValid | ( | geometry_msgs::Transform const & | pose | ) |
Definition at line 28 of file pose_utilities.cpp.
| bool isValid | ( | tf2::Vector3 const & | vector | ) |
Definition at line 23 of file pose_utilities.cpp.
| tf2::Transform poseFromNxLib | ( | NxLibItem const & | node | ) |
Convert the given NxLib transformation node to a TF pose.
Definition at line 76 of file pose_utilities.cpp.
| geometry_msgs::TransformStamped poseFromNxLib | ( | NxLibItem const & | node, |
| std::string const & | parentFrame, | ||
| std::string const & | childFrame | ||
| ) |
Creates a stamped transformation from frame to child frame with given link described in the node.
Definition at line 97 of file pose_utilities.cpp.
| geometry_msgs::Pose poseFromTransform | ( | tf2::Transform const & | transform | ) |
Definition at line 193 of file pose_utilities.cpp.
| geometry_msgs::PoseStamped stampedPoseFromTransform | ( | geometry_msgs::TransformStamped const & | transform | ) |
Get a geometry pose from a transform, where pose has the same rotation and translation as the transform.
Definition at line 126 of file pose_utilities.cpp.
| geometry_msgs::TransformStamped transformFromPose | ( | geometry_msgs::PoseStamped const & | pose, |
| std::string const & | childFrame | ||
| ) |
Get a TF transformation that defines the child frame at the position of the given pose.
Definition at line 110 of file pose_utilities.cpp.
| void writePoseToNxLib | ( | tf2::Transform const & | pose, |
| NxLibItem const & | node | ||
| ) |
Convert the given TF pose to an NxLib transformation and write it into the given NxLib node.
Definition at line 33 of file pose_utilities.cpp.