#include <hardware_interface.hpp>
Public Types | |
| using | id_t = typename Protocol::id_t |
Public Member Functions | |
| DynamixelHardwareInterface () | |
| bool | init (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) |
| virtual void | read (const ros::Time &time, const ros::Duration &elapsed_time) |
| virtual void | write (const ros::Time &time, const ros::Duration &elapsed_time) |
| ~DynamixelHardwareInterface () | |
 Public Member Functions inherited from hardware_interface::RobotHW Public Member Functions inherited from hardware_interface::RobotHW | |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| RobotHW () | |
| virtual | ~RobotHW () |
| Public Member Functions inherited from hardware_interface::InterfaceManager | |
| T * | get () |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| std::vector< std::string > | getNames () const |
| void | registerInterface (T *iface) |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
Private Types | |
| using | dynamixel_servo = std::shared_ptr< dynamixel::servos::BaseServo< Protocol >> |
Private Member Functions | |
| void | _enable_and_configure_servo (dynamixel_servo servo, OperatingMode mode) |
| void | _enforce_limits (const ros::Duration &loop_period) |
| bool | _find_servos () |
| bool | _get_ros_parameters (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) |
| bool | _load_urdf (ros::NodeHandle &nh, std::string param_name) |
| void | _register_joint_limits (const hardware_interface::JointHandle &cmd_handle, id_t id) |
| dynamixel::OperatingMode | _str2mode (const std::string &mode_string, std::string name) |
| DynamixelHardwareInterface (DynamixelHardwareInterface< Protocol > const &)=delete | |
| DynamixelHardwareInterface & | operator= (DynamixelHardwareInterface< Protocol > const &)=delete |
Private Attributes | |
| int | _baudrate |
| std::unordered_map< id_t, OperatingMode > | _c_mode_map |
| dynamixel::controllers::Usb2Dynamixel | _dynamixel_controller |
| std::unordered_map< id_t, double > | _dynamixel_corrections |
| std::unordered_map< id_t, std::string > | _dynamixel_map |
| std::unordered_map< id_t, double > | _dynamixel_max_speed |
| std::unordered_map< id_t, bool > | _invert |
| hardware_interface::PositionJointInterface | _jnt_pos_interface |
| joint_limits_interface::PositionJointSoftLimitsInterface | _jnt_pos_lim_interface |
| joint_limits_interface::PositionJointSaturationInterface | _jnt_pos_sat_interface |
| hardware_interface::JointStateInterface | _jnt_state_interface |
| hardware_interface::VelocityJointInterface | _jnt_vel_interface |
| joint_limits_interface::VelocityJointSoftLimitsInterface | _jnt_vel_lim_interface |
| joint_limits_interface::VelocityJointSaturationInterface | _jnt_vel_sat_interface |
| std::vector< double > | _joint_angles |
| std::vector< double > | _joint_commands |
| std::vector< double > | _joint_efforts |
| std::vector< double > | _joint_velocities |
| ros::NodeHandle | _nh |
| std::vector< double > | _prev_commands |
| float | _read_timeout |
| float | _scan_timeout |
| std::vector< dynamixel_servo > | _servos |
| std::shared_ptr< urdf::Model > | _urdf_model |
| std::string | _usb_serial_interface |
Additional Inherited Members | |
| Protected Types inherited from hardware_interface::InterfaceManager | |
| typedef std::vector< InterfaceManager * > | InterfaceManagerVector |
| typedef std::map< std::string, void * > | InterfaceMap |
| typedef std::map< std::string, std::vector< std::string > > | ResourceMap |
| typedef std::map< std::string, size_t > | SizeMap |
| Protected Attributes inherited from hardware_interface::InterfaceManager | |
| boost::ptr_vector< ResourceManagerBase > | interface_destruction_list_ |
| InterfaceManagerVector | interface_managers_ |
| InterfaceMap | interfaces_ |
| InterfaceMap | interfaces_combo_ |
| SizeMap | num_ifaces_registered_ |
| ResourceMap | resources_ |
Detailed Description
template<class Protocol>
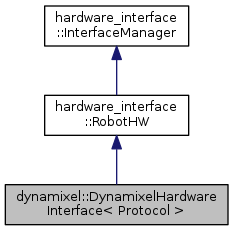
class dynamixel::DynamixelHardwareInterface< Protocol >
Hardware interface for a set of dynamixel actuators.
This class fits in the ros_control framework for robot control.
Warning: this code is currently limited to joint-mode dynamixel actuators
Definition at line 36 of file hardware_interface.hpp.
Member Typedef Documentation
|
private |
Definition at line 69 of file hardware_interface.hpp.
| using dynamixel::DynamixelHardwareInterface< Protocol >::id_t = typename Protocol::id_t |
Definition at line 39 of file hardware_interface.hpp.
Constructor & Destructor Documentation
|
inline |
Definition at line 41 of file hardware_interface.hpp.
| dynamixel::DynamixelHardwareInterface< Protocol >::~DynamixelHardwareInterface | ( | ) |
Definition at line 134 of file hardware_interface.hpp.
|
privatedelete |
Member Function Documentation
|
private |
Enable torque output for a joint and send it the relevant settings.
For now, these settings are only the speed limit.
- Parameters
-
servo the actuator concerned mode operating mode of the actuator (e.g. position or velocity, in dynamixel speech, joint, wheel, etc.)
Definition at line 663 of file hardware_interface.hpp.
|
private |
Definition at line 829 of file hardware_interface.hpp.
|
private |
Search for the requested servos
Servos that were not requested are ignored and the software complain if any required one misses.
- Returns
- true if and only if there was no error
Definition at line 596 of file hardware_interface.hpp.
|
private |
Retrieve all needed ROS parameters
- Returns
- true if and only if all went well
Definition at line 435 of file hardware_interface.hpp.
|
private |
Search for the robot's URDF model on the parameter server and parse it
- Parameters
-
nh NodeHandle used to query for the URDF param_name name of the ROS parameter holding the robot model urdf_model pointer to be populated by this function
Definition at line 575 of file hardware_interface.hpp.
|
private |
Definition at line 710 of file hardware_interface.hpp.
|
private |
Convert a string to an operating mode for a Dynamixel servo
- Parameters
-
mode_string name of the operating mode (either velocity or position) nam name of the joint
- Returns
- dynamixel::OperatingMode::unknown if mode_string is not recognized
Definition at line 550 of file hardware_interface.hpp.
|
virtual |
Initialise the whole hardware interface.
Set the essential parameters for communication with the hardware and find all connected devices and register those referred in dynamixel_map in the hardware interface.
Reimplemented from hardware_interface::RobotHW.
Definition at line 152 of file hardware_interface.hpp.
|
privatedelete |
|
virtual |
Copy joint's information to memory
firstly queries the information from the dynamixels, then put it in private attributes, for use by a controller.
Warning: do not get any information on torque
Reimplemented from hardware_interface::RobotHW.
Definition at line 274 of file hardware_interface.hpp.
|
virtual |
Send new joint's target position to dynamixels
takes the target position from memory (given by a controller) and sends them to the dynamixels.
Reimplemented from hardware_interface::RobotHW.
Definition at line 357 of file hardware_interface.hpp.
Member Data Documentation
|
private |
Definition at line 108 of file hardware_interface.hpp.
|
private |
Definition at line 118 of file hardware_interface.hpp.
|
private |
Definition at line 111 of file hardware_interface.hpp.
|
private |
Definition at line 124 of file hardware_interface.hpp.
|
private |
Definition at line 116 of file hardware_interface.hpp.
|
private |
Definition at line 122 of file hardware_interface.hpp.
|
private |
Definition at line 120 of file hardware_interface.hpp.
|
private |
Definition at line 89 of file hardware_interface.hpp.
|
private |
Definition at line 93 of file hardware_interface.hpp.
|
private |
Definition at line 95 of file hardware_interface.hpp.
|
private |
Definition at line 88 of file hardware_interface.hpp.
|
private |
Definition at line 90 of file hardware_interface.hpp.
|
private |
Definition at line 94 of file hardware_interface.hpp.
|
private |
Definition at line 96 of file hardware_interface.hpp.
|
private |
Definition at line 102 of file hardware_interface.hpp.
|
private |
Definition at line 101 of file hardware_interface.hpp.
|
private |
Definition at line 104 of file hardware_interface.hpp.
|
private |
Definition at line 103 of file hardware_interface.hpp.
|
private |
Definition at line 127 of file hardware_interface.hpp.
|
private |
Definition at line 100 of file hardware_interface.hpp.
|
private |
Definition at line 109 of file hardware_interface.hpp.
|
private |
Definition at line 109 of file hardware_interface.hpp.
|
private |
Definition at line 114 of file hardware_interface.hpp.
|
private |
Definition at line 130 of file hardware_interface.hpp.
|
private |
Definition at line 107 of file hardware_interface.hpp.
The documentation for this class was generated from the following file: