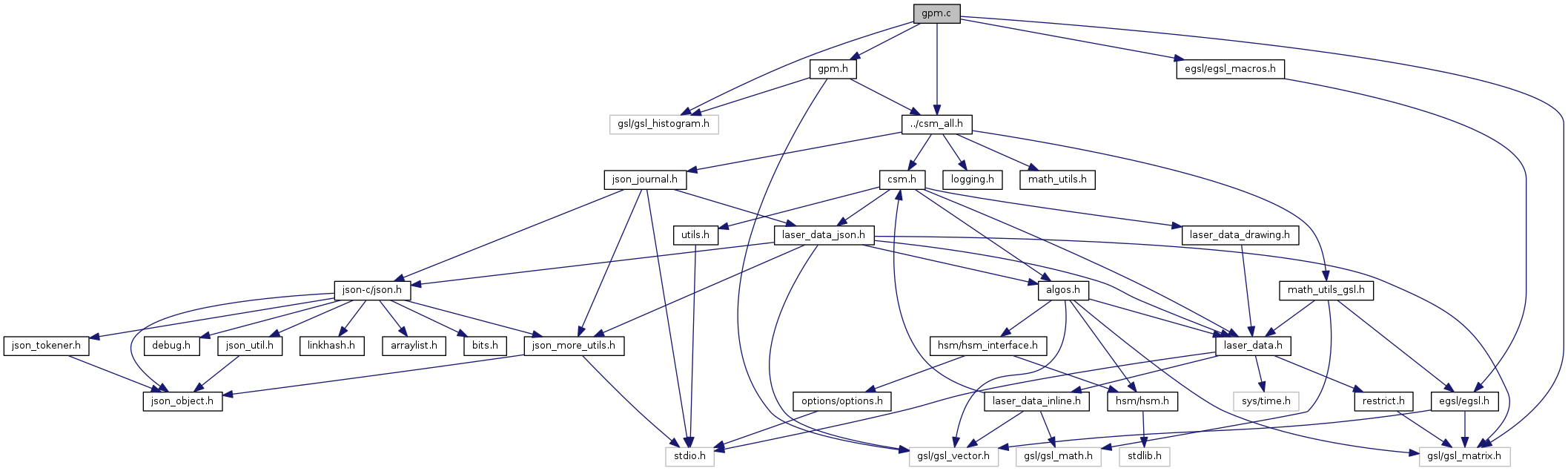
#include <gsl/gsl_histogram.h>#include <gsl/gsl_matrix.h>#include "../csm_all.h"#include "gpm.h"#include <egsl/egsl_macros.h>
Include dependency graph for gpm.c:
Go to the source code of this file.
Functions | |
| void | ght_find_theta_range (LDP laser_ref, LDP laser_sens, const double *x0, double max_linear_correction, double max_angular_correction_deg, int interval, gsl_histogram *hist, int *num_correspondences) |
| void | ght_one_shot (LDP laser_ref, LDP laser_sens, const double *x0, double max_linear_correction, double max_angular_correction_deg, int interval, double *x, int *num_correspondences) |
| void | sm_gpm (struct sm_params *params, struct sm_result *res) |