#include <string>#include <vector>#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <Eigen/Geometry>#include "cob_twist_controller/kinematic_extensions/kinematic_extension_base.h"
Include dependency graph for kinematic_extension_dof.h:

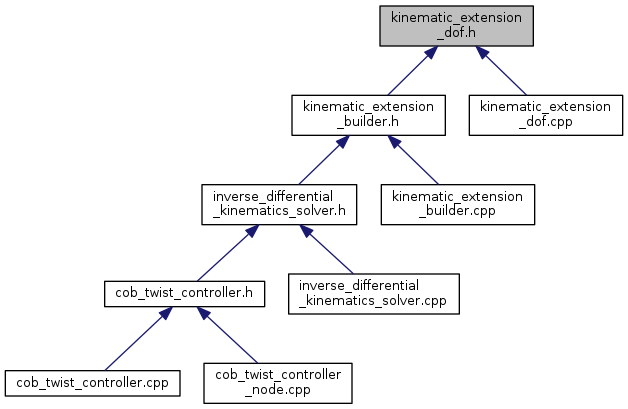
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | KinematicExtensionBaseActive |
| Class implementing a mobile base KinematicExtension with Cartesian DoFs (lin_x, lin_y, rot_z) enabled (i.e. 2D). More... | |
| class | KinematicExtensionDOF |
| Abstract Helper Class to be used for Cartesian KinematicExtensions based on enabled DoFs. More... | |