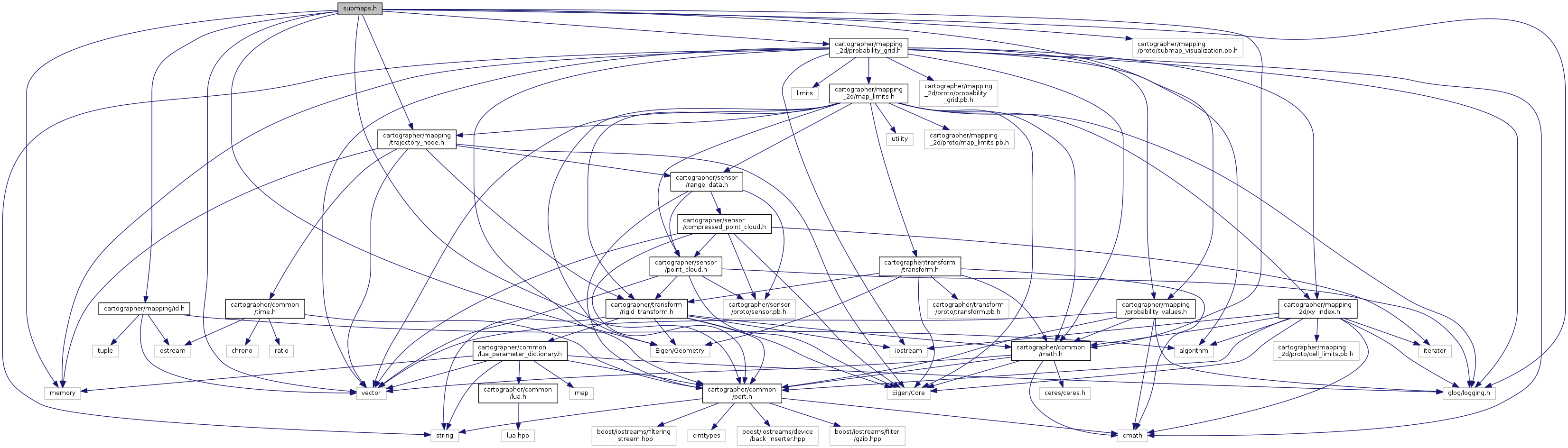
#include <memory>#include <vector>#include "Eigen/Geometry"#include "cartographer/common/math.h"#include "cartographer/common/port.h"#include "cartographer/mapping/id.h"#include "cartographer/mapping/probability_values.h"#include "cartographer/mapping/proto/submap_visualization.pb.h"#include "cartographer/mapping/trajectory_node.h"#include "cartographer/mapping_2d/probability_grid.h"#include "glog/logging.h"
Include dependency graph for submaps.h:
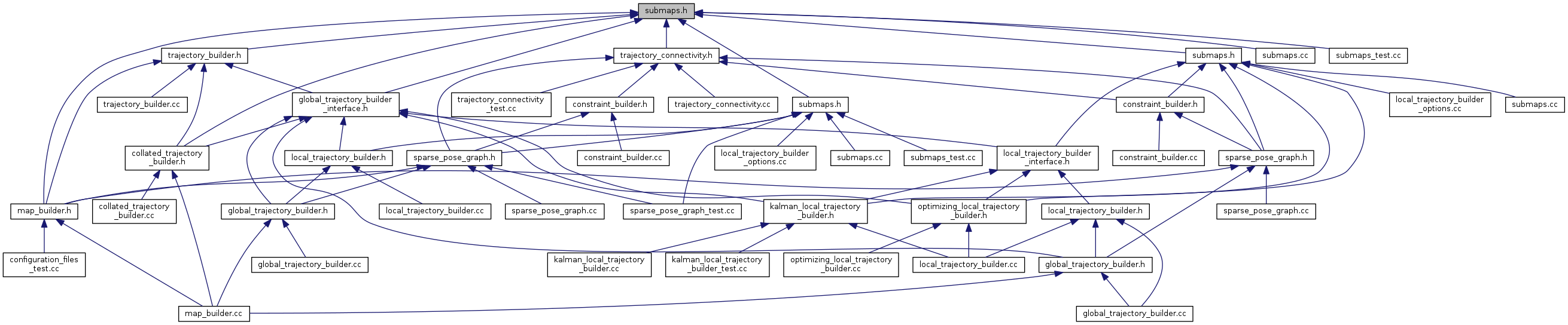
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cartographer::mapping::Submap |
| class | cartographer::mapping::Submaps |
Namespaces | |
| cartographer | |
| cartographer::mapping | |
Functions | |
| float | cartographer::mapping::Logit (float probability) |
| uint8 | cartographer::mapping::ProbabilityToLogOddsInteger (const float probability) |
Variables | |
| const float | cartographer::mapping::kMaxLogOdds = Logit(kMaxProbability) |
| const float | cartographer::mapping::kMinLogOdds = Logit(kMinProbability) |