Particle filter using EKF for proposal step. More...
#include <EKparticlefilter.h>
Public Member Functions | |
| EKParticleFilter (MCPdf< ColumnVector > *prior, int resampleperiod=0, double resamplethreshold=0, int resamplescheme=DEFAULT_RS) | |
| Constructor. More... | |
| virtual | ~EKParticleFilter () |
| Destructor. More... | |
 Public Member Functions inherited from BFL::ParticleFilter< ColumnVector, ColumnVector > Public Member Functions inherited from BFL::ParticleFilter< ColumnVector, ColumnVector > | |
| ParticleFilter (MCPdf< ColumnVector > *prior, ConditionalPdf< ColumnVector, ColumnVector > *proposal, int resampleperiod=0, double resamplethreshold=0, int resamplescheme=DEFAULT_RS) | |
| Constructor. More... | |
| ParticleFilter (MCPdf< ColumnVector > *prior, MCPdf< ColumnVector > *post, ConditionalPdf< ColumnVector, ColumnVector > *proposal, int resampleperiod=0, double resamplethreshold=0, int resamplescheme=DEFAULT_RS) | |
| Constructor. More... | |
| ParticleFilter (const ParticleFilter< ColumnVector, ColumnVector > &filt) | |
| Copy Constructor. More... | |
| virtual MCPdf< ColumnVector > * | PostGet () |
| Get Posterior density. More... | |
| ConditionalPdf< ColumnVector, ColumnVector > * | ProposalGet () |
| Get a pointer to the proposal density. More... | |
| virtual void | ProposalSet (ConditionalPdf< ColumnVector, ColumnVector > *const cpdf) |
| Set the proposal density. More... | |
| virtual | ~ParticleFilter () |
| Destructor. More... | |
| Public Member Functions inherited from BFL::Filter< ColumnVector, ColumnVector > | |
| Filter (Pdf< ColumnVector > *prior) | |
| Constructor. More... | |
| Filter (const Filter< ColumnVector, ColumnVector > &filt) | |
| copy constructor More... | |
| virtual void | Reset (Pdf< ColumnVector > *prior) |
| Reset Filter. More... | |
| int | TimeStepGet () const |
| Get current time. More... | |
| virtual bool | Update (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| Full Update (system with inputs/sensing params) More... | |
| virtual bool | Update (SystemModel< ColumnVector > *const sysmodel, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| Full Update (system without inputs, with sensing params) More... | |
| virtual bool | Update (SystemModel< ColumnVector > *const sysmodel, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z) |
| Full Update (system without inputs/sensing params) More... | |
| virtual bool | Update (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z) |
| Full Update (system with inputs, without sensing params) More... | |
| virtual bool | Update (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u) |
| System Update (system with inputs) More... | |
| virtual bool | Update (SystemModel< ColumnVector > *const sysmodel) |
| System Update (system without inputs) More... | |
| virtual bool | Update (MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| Measurement Update (system with "sensing params") More... | |
| virtual bool | Update (MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z) |
| Measurement Update (system without "sensing params") More... | |
| virtual | ~Filter () |
| destructor More... | |
Protected Member Functions | |
| virtual bool | ProposalStepInternal (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| virtual bool | Resample () |
| Resample also redefined for the same reasons... More... | |
| virtual bool | UpdateInternal (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| Actual implementation of Update, varies along filters. More... | |
| Protected Member Functions inherited from BFL::ParticleFilter< ColumnVector, ColumnVector > | |
| virtual bool | DynamicResampleStep () |
| Resample if necessary. More... | |
| virtual bool | StaticResampleStep () |
| Resample if wanted. More... | |
| virtual bool | UpdateWeightsInternal (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u, MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| Update Weights. More... | |
Protected Attributes | |
| std::vector< SymmetricMatrix >::iterator | _cov_it |
| std::vector< double > | _CumPDF |
| std::vector< double >::const_iterator | _CumPDFit |
| const int | _dimension |
| const int | _num_samples |
| std::vector< WeightedSample< ColumnVector > >::iterator | _oit |
| std::vector< WeightedSample< ColumnVector > > | _old_samples |
| std::vector< WeightedSample< ColumnVector > > | _result_samples |
| std::vector< WeightedSample< ColumnVector > >::iterator | _rit |
| Sample< ColumnVector > | _sample |
| std::vector< SymmetricMatrix > | _sampleCov |
| Sample Covariances for use with EKF Proposal density. More... | |
| std::vector< SymmetricMatrix > | _tmpCov |
| std::vector< SymmetricMatrix >::iterator | _tmpCovit |
| std::vector< double > | _unif_samples |
| ColumnVector | _x_old |
| Protected Attributes inherited from BFL::ParticleFilter< ColumnVector, ColumnVector > | |
| bool | _created_post |
| created own post More... | |
| bool | _dynamicResampling |
| Dynamic resampling or fixed period resampling? More... | |
| vector< WeightedSample< ColumnVector > > | _new_samples |
| While updating store list of new samples. More... | |
| vector< Sample< ColumnVector > > | _new_samples_unweighted |
| While resampling. More... | |
| vector< WeightedSample< ColumnVector > >::iterator | _ns_it |
| Iterator for new list of samples. More... | |
| vector< WeightedSample< ColumnVector > > | _old_samples |
| While updating store list of old samples. More... | |
| vector< WeightedSample< ColumnVector > >::iterator | _os_it |
| Iterator for old list of samples. More... | |
| ConditionalPdf< ColumnVector, ColumnVector > * | _proposal |
| Pointer to the Proposal Density. More... | |
| bool | _proposal_depends_on_meas |
| Proposal depends on last measurement? More... | |
| int | _resamplePeriod |
| Number of timestep between resampling from the Posterior Pdf. More... | |
| int | _resampleScheme |
| Which resample algorithm (see top of particle.h for #defines) More... | |
| double | _resampleThreshold |
| Threshold used when dynamic resampling. More... | |
| WeightedSample< ColumnVector > | _sample |
| While updating use sample<StateVar> More... | |
| Protected Attributes inherited from BFL::Filter< ColumnVector, ColumnVector > | |
| Pdf< ColumnVector > * | _post |
| Pointer to the Posterior Pdf. More... | |
| Pdf< ColumnVector > * | _prior |
| prior Pdf More... | |
| int | _timestep |
| Represents the current timestep of the filter. More... | |
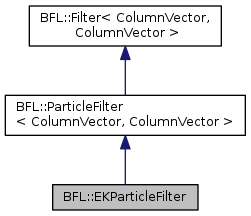
Detailed Description
Particle filter using EKF for proposal step.
NOTE: Only applicable to continuous problems with additive gaussian noise, so the models you specify ... specify should by
Definition at line 35 of file EKparticlefilter.h.
Constructor & Destructor Documentation
| BFL::EKParticleFilter::EKParticleFilter | ( | MCPdf< ColumnVector > * | prior, |
| int | resampleperiod = 0, |
||
| double | resamplethreshold = 0, |
||
| int | resamplescheme = DEFAULT_RS |
||
| ) |
Constructor.
- Precondition
- you created the necessary models and the prior
- Parameters
-
prior pointer to the Monte Carlo Pdf prior density resampleperiod fixed resampling period (if desired) resamplethreshold threshold used when dynamic resampling resamplescheme resampling scheme, see header file for different defines and their meaning
- Bug:
- prior should be of type pdf and not mcpdf. See also notes with implementation
Definition at line 26 of file EKparticlefilter.cpp.
|
virtual |
Destructor.
Definition at line 50 of file EKparticlefilter.cpp.
Member Function Documentation
|
protectedvirtual |
Proposalstep is redefined here since we have to take into account the sample covariances here!
Reimplemented from BFL::ParticleFilter< ColumnVector, ColumnVector >.
Definition at line 117 of file EKparticlefilter.cpp.
|
protectedvirtual |
Resample also redefined for the same reasons...
Reimplemented from BFL::ParticleFilter< ColumnVector, ColumnVector >.
Definition at line 76 of file EKparticlefilter.cpp.
|
protectedvirtual |
Actual implementation of Update, varies along filters.
- Parameters
-
sysmodel pointer to the used system model u input param for proposal density measmodel pointer to the used measurementmodel z measurement param for proposal density s sensor param for proposal density
Reimplemented from BFL::ParticleFilter< ColumnVector, ColumnVector >.
Definition at line 57 of file EKparticlefilter.cpp.
Member Data Documentation
|
protected |
Definition at line 41 of file EKparticlefilter.h.
|
protected |
Definition at line 54 of file EKparticlefilter.h.
|
protected |
Definition at line 55 of file EKparticlefilter.h.
|
protected |
Definition at line 47 of file EKparticlefilter.h.
|
protected |
Definition at line 48 of file EKparticlefilter.h.
|
protected |
Definition at line 50 of file EKparticlefilter.h.
|
protected |
Definition at line 49 of file EKparticlefilter.h.
|
protected |
Definition at line 51 of file EKparticlefilter.h.
|
protected |
Definition at line 52 of file EKparticlefilter.h.
|
protected |
Definition at line 57 of file EKparticlefilter.h.
|
protected |
Sample Covariances for use with EKF Proposal density.
Definition at line 40 of file EKparticlefilter.h.
|
protected |
Definition at line 43 of file EKparticlefilter.h.
|
protected |
Definition at line 44 of file EKparticlefilter.h.
|
protected |
Definition at line 53 of file EKparticlefilter.h.
|
protected |
Definition at line 56 of file EKparticlefilter.h.
The documentation for this class was generated from the following files: