#include "stdint.h"#include <stdlib.h>#include <string.h>#include "dn_additional.h"#include "dn_common.h"#include "dn_device.h"#include "dn_udp.h"#include "dn_com.h"#include "dn_thread.h"#include "dn_robotalk.h"#include "dn_tpcomm.h"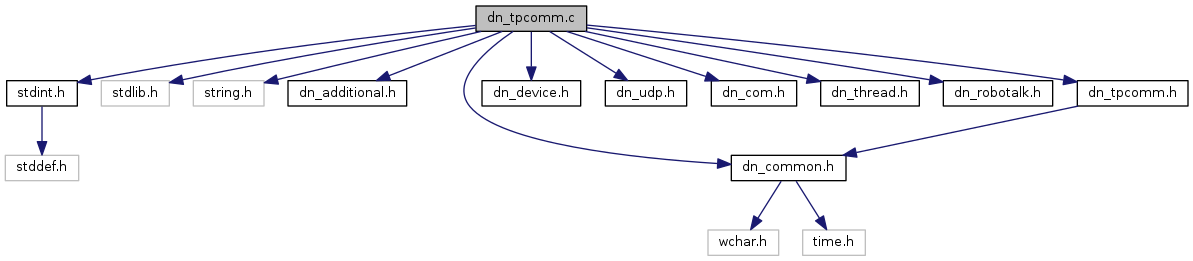
Go to the source code of this file.
Classes | |
| struct | CONN_PARAM_TP |
| TP communication object. More... | |
| struct | TP_FLAGS |
| TP flag objects. More... | |
Macros | |
| #define | _DEBUG (0) |
| #define | _PING_INTERVAL_CONNECT (300) |
| A definition for the sending interval of the ping packet when TP connected. More... | |
| #define | _PING_INTERVAL_TPERROR (1000) |
| A definition for the sending interval of the ping packet when TP is error state. More... | |
| #define | _TIMER_INTERVAL (10) |
| A definition for the interval of the timer event. More... | |
| #define | _TP_CMD_SPECIAL (0x0FFF) |
| A definition for the ROBOTalk command which means special command. More... | |
| #define | _TP_INIT_WAIT_CLIENT (100) |
| A definition for the wait time of the initialization when the client mode. More... | |
| #define | _TP_INIT_WAIT_SERVER (3000) |
| A definition for the wait time of the initialization when the server mode. More... | |
| #define | _TPERROR_TIMEOUT (10000) |
| A definition for the timeout which is used to raise disconnect event. More... | |
| #define | _TPLESS_INTERVAL (10000) |
| A definition for the interval of the TP less event. More... | |
Functions | |
| static struct CONN_PARAM_TP * | check_address (int index) |
| Checks whether the index has been used or not. More... | |
| static int | find_open_address () |
| Returns the open address of m_conn_param. More... | |
| static HRESULT | receive_execute (struct CONN_PARAM_TP *tp_param) |
| Receives the ROBOTalk packet and executes callback functions. More... | |
| static THRET THTYPE | recv_thread (void *arg) |
| The receiving thread. More... | |
| static HRESULT | send_receive (int index, unsigned int retry_timeout, uint16_t command_send, uint8_t *data_send, uint8_t len_send, uint16_t *command_recv, uint8_t *data_recv, uint8_t *len_recv) |
| static HRESULT | timer_event (struct CONN_PARAM_TP *tp_param) |
| Executes timer event procedure. More... | |
| static THRET THTYPE | timer_thread (void *arg) |
| The timer thread. More... | |
| static HRESULT | tp_callfunc (uint16_t command, const uint8_t *data, uint8_t len_data) |
| Execute a callback function with the ROBOTalk command. More... | |
| static HRESULT | tp_recv (struct CONN_PARAM_TP *tp_param, unsigned int retry_nak, uint16_t *command, uint8_t *data, uint8_t *len_data) |
| static HRESULT | tp_send (struct CONN_PARAM_TP *tp_param, uint16_t command, uint8_t *data, uint8_t len_data) |
| HRESULT | TPComm_BEEP (int fd, int16_t time) |
| TP beeps. More... | |
| HRESULT | TPComm_Close (int *pfd) |
| Ends TP communication. More... | |
| HRESULT | TPComm_DrawLine (int fd, uint8_t start_x, uint8_t start_y, uint8_t end_x, uint8_t end_y, uint8_t color_fg) |
| Draws a line to Mini TP. More... | |
| HRESULT | TPComm_DrawMiniTP (int fd, VARIANT commands) |
| Sends Draw Mini TP commands. More... | |
| HRESULT | TPComm_DrawRectangle (int fd, uint8_t start_x, uint8_t start_y, uint8_t end_x, uint8_t end_y, uint8_t color_fg, uint8_t color_bg) |
| Draws a rectangle to Mini TP. More... | |
| HRESULT | TPComm_DrawString (int fd, BSTR bstr, uint8_t pos_x, uint8_t pos_y, uint8_t size, uint8_t attr, uint8_t color_fg, uint8_t color_bg) |
| Draws a string to Mini TP. More... | |
| HRESULT | TPComm_GetTimeout (int fd, uint32_t *timeout) |
| Gets timeout. More... | |
| HRESULT | TPComm_GetTPState (int fd, int *state) |
| Gets TP state. More... | |
| HRESULT | TPComm_LCD (int fd, int16_t contrast) |
| Changes TP LCD. More... | |
| HRESULT | TPComm_LED (int fd, int16_t number, int16_t state) |
| Changes TP LED. More... | |
| HRESULT | TPComm_Open (const char *connect, uint32_t timeout, int client, int *pfd) |
| Starts TP communication. More... | |
| HRESULT | TPComm_SetCallFunc (const struct CALL_FUNC_TP *func) |
| Sets callback functions. More... | |
| HRESULT | TPComm_SetTimeout (int fd, uint32_t timeout) |
| Sets timeout. More... | |
Variables | |
| static struct CALL_FUNC_TP | m_call_func |
| static struct CONN_PARAM_TP | m_conn_param [TP_CONN_MAX] |
Macro Definition Documentation
| #define _DEBUG (0) |
- Copyright
- Copyright (c) 2015 DENSO WAVE INCORPORATED
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
Definition at line 50 of file dn_tpcomm.c.
| #define _PING_INTERVAL_CONNECT (300) |
A definition for the sending interval of the ping packet when TP connected.
- Note
- times in milliseconds.
Definition at line 85 of file dn_tpcomm.c.
| #define _PING_INTERVAL_TPERROR (1000) |
A definition for the sending interval of the ping packet when TP is error state.
- Note
- times in milliseconds.
Definition at line 92 of file dn_tpcomm.c.
| #define _TIMER_INTERVAL (10) |
A definition for the interval of the timer event.
- Note
- times in milliseconds.
Definition at line 64 of file dn_tpcomm.c.
| #define _TP_CMD_SPECIAL (0x0FFF) |
A definition for the ROBOTalk command which means special command.
Definition at line 57 of file dn_tpcomm.c.
| #define _TP_INIT_WAIT_CLIENT (100) |
A definition for the wait time of the initialization when the client mode.
- Note
- times in milliseconds.
Definition at line 99 of file dn_tpcomm.c.
| #define _TP_INIT_WAIT_SERVER (3000) |
A definition for the wait time of the initialization when the server mode.
- Note
- times in milliseconds.
Definition at line 106 of file dn_tpcomm.c.
| #define _TPERROR_TIMEOUT (10000) |
A definition for the timeout which is used to raise disconnect event.
- Note
- times in milliseconds.
Definition at line 71 of file dn_tpcomm.c.
| #define _TPLESS_INTERVAL (10000) |
A definition for the interval of the TP less event.
- Note
- times in milliseconds.
Definition at line 78 of file dn_tpcomm.c.
Function Documentation
|
static |
Checks whether the index has been used or not.
- Parameters
-
[in] index The index of m_conn_param.
- Note
- If the index has not been used then returns NULL.
Definition at line 173 of file dn_tpcomm.c.
|
static |
Returns the open address of m_conn_param.
- Note
- If there is no open space, then returns 0.
Definition at line 152 of file dn_tpcomm.c.
|
static |
Receives the ROBOTalk packet and executes callback functions.
- Parameters
-
[in] tp_param TP communication object.
Definition at line 452 of file dn_tpcomm.c.
|
static |
The receiving thread.
- Parameters
-
[in] arg The argument of receiving thread: CONN_PARAM_TP.
Definition at line 663 of file dn_tpcomm.c.
|
static |
Definition at line 394 of file dn_tpcomm.c.
|
static |
Executes timer event procedure.
- Parameters
-
[in] tp_param TP communication object.
Definition at line 583 of file dn_tpcomm.c.
|
static |
The timer thread.
- Parameters
-
[in] arg The argument of timer thread: CONN_PARAM_TP.
Definition at line 697 of file dn_tpcomm.c.
Execute a callback function with the ROBOTalk command.
- Parameters
-
[in] command The received ROBOTalk command. [in] data The received ROBOTalk data. [in] len_data The length of received ROBOTalk data.
Definition at line 195 of file dn_tpcomm.c.
|
static |
Definition at line 321 of file dn_tpcomm.c.
|
static |
Definition at line 287 of file dn_tpcomm.c.
TP beeps.
- Parameters
-
[in] fd File descriptor. [in] time Beeping time.
Definition at line 1002 of file dn_tpcomm.c.
| HRESULT TPComm_Close | ( | int * | pfd | ) |
Ends TP communication.
- Parameters
-
[in,out] pfd The pointer of File descriptor.
Definition at line 885 of file dn_tpcomm.c.
| HRESULT TPComm_DrawLine | ( | int | fd, |
| uint8_t | start_x, | ||
| uint8_t | start_y, | ||
| uint8_t | end_x, | ||
| uint8_t | end_y, | ||
| uint8_t | color_fg | ||
| ) |
Draws a line to Mini TP.
- Parameters
-
[in] fd File descriptor. [in] start_x The start position for axis X. [in] start_y The start position for axis Y. [in] end_x The end position for axis X. [in] end_y The end position for axis Y. [in] color_fg The color of drawing line.
Definition at line 1264 of file dn_tpcomm.c.
Sends Draw Mini TP commands.
- Parameters
-
[in] fd File descriptor. [in] commands Mini TP commands.
Definition at line 1062 of file dn_tpcomm.c.
| HRESULT TPComm_DrawRectangle | ( | int | fd, |
| uint8_t | start_x, | ||
| uint8_t | start_y, | ||
| uint8_t | end_x, | ||
| uint8_t | end_y, | ||
| uint8_t | color_fg, | ||
| uint8_t | color_bg | ||
| ) |
Draws a rectangle to Mini TP.
- Parameters
-
[in] fd File descriptor. [in] start_x The start position for axis X. [in] start_y The start position for axis Y. [in] end_x The end position for axis X. [in] end_y The end position for axis Y. [in] color_fg The color of drawing rectangle. [in] color_fg The background color of drawing rectangle.
Definition at line 1311 of file dn_tpcomm.c.
| HRESULT TPComm_DrawString | ( | int | fd, |
| BSTR | bstr, | ||
| uint8_t | pos_x, | ||
| uint8_t | pos_y, | ||
| uint8_t | size, | ||
| uint8_t | attr, | ||
| uint8_t | color_fg, | ||
| uint8_t | color_bg | ||
| ) |
Draws a string to Mini TP.
- Parameters
-
[in] fd File descriptor. [in] bstr The drawing string. [in] pos_x The drawing position for axis X. [in] pos_y The drawing position for axis Y. [in] size The size of drawing string. [in] attr The attribute of drawing string. [in] color_fg The color of drawing string. [in] color_bg The background color of drawing string.
Definition at line 1203 of file dn_tpcomm.c.
Gets timeout.
- Parameters
-
[in] fd File descriptor. [out] timeout The gotten timeout value.
Definition at line 966 of file dn_tpcomm.c.
| HRESULT TPComm_GetTPState | ( | int | fd, |
| int * | state | ||
| ) |
Gets TP state.
- Parameters
-
[in] fd File descriptor. [out] state The gotten TP state.
Definition at line 985 of file dn_tpcomm.c.
Changes TP LCD.
- Parameters
-
[in] fd File descriptor. [in] contrast The LCD value. (0: The most darken, 7: The most brightest) note It will take 2 or more seconds to reflect the set LDC value completely.
Definition at line 1047 of file dn_tpcomm.c.
Changes TP LED.
- Parameters
-
[in] fd File descriptor. [in] number The LED number. (1: MORTOR, 2: LOCK, -1: Both) [in] state State to be changed. (0: OFF, 1: ON, 2: FLASH)
Definition at line 1017 of file dn_tpcomm.c.
Starts TP communication.
- Parameters
-
[in] connect Connection parameters. [in] timeout Timeout value. [in] client TP mode flag. (Client: = 1, Server: 0) [out] pfd The pointer of File descriptor.
Definition at line 748 of file dn_tpcomm.c.
| HRESULT TPComm_SetCallFunc | ( | const struct CALL_FUNC_TP * | func | ) |
Sets callback functions.
- Parameters
-
[in] func Callback functions to be set.
Definition at line 737 of file dn_tpcomm.c.
Sets timeout.
- Parameters
-
[in] fd File descriptor. [in] timeout Timeout value to be set.
Definition at line 935 of file dn_tpcomm.c.
Variable Documentation
|
static |
Definition at line 144 of file dn_tpcomm.c.
|
static |
Definition at line 143 of file dn_tpcomm.c.