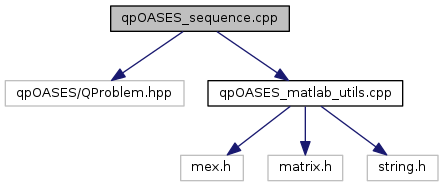
#include <qpOASES/QProblem.hpp>
#include <qpOASES_matlab_utils.cpp>
Go to the source code of this file.
|
| void | allocateGlobalQProblemInstance (int nV, int nC, Options *options) |
| |
| void | deleteGlobalQProblemInstance () |
| |
| void | deleteGlobalQProblemMatrices () |
| |
| void | hotstart (const real_t *const g, const real_t *const lb, const real_t *const ub, const real_t *const lbA, const real_t *const ubA, int nWSR, Options *options, int nOutputs, mxArray *plhs[]) |
| |
| void | init (int nV, int nC, SymmetricMatrix *H, real_t *g, Matrix *A, const real_t *const lb, const real_t *const ub, const real_t *const lbA, const real_t *const ubA, int nWSR, const real_t *const x0, Options *options, int nOutputs, mxArray *plhs[]) |
| |
| void | mexFunction (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| |
| void allocateGlobalQProblemInstance |
( |
int |
nV, |
|
|
int |
nC, |
|
|
Options * |
options |
|
) |
| |
| void deleteGlobalQProblemInstance |
( |
| ) |
|
| void deleteGlobalQProblemMatrices |
( |
| ) |
|
| void hotstart |
( |
const real_t *const |
g, |
|
|
const real_t *const |
lb, |
|
|
const real_t *const |
ub, |
|
|
const real_t *const |
lbA, |
|
|
const real_t *const |
ubA, |
|
|
int |
nWSR, |
|
|
Options * |
options, |
|
|
int |
nOutputs, |
|
|
mxArray * |
plhs[] |
|
) |
| |
| void init |
( |
int |
nV, |
|
|
int |
nC, |
|
|
SymmetricMatrix * |
H, |
|
|
real_t * |
g, |
|
|
Matrix * |
A, |
|
|
const real_t *const |
lb, |
|
|
const real_t *const |
ub, |
|
|
const real_t *const |
lbA, |
|
|
const real_t *const |
ubA, |
|
|
int |
nWSR, |
|
|
const real_t *const |
x0, |
|
|
Options * |
options, |
|
|
int |
nOutputs, |
|
|
mxArray * |
plhs[] |
|
) |
| |
| void mexFunction |
( |
int |
nlhs, |
|
|
mxArray * |
plhs[], |
|
|
int |
nrhs, |
|
|
const mxArray * |
prhs[] |
|
) |
| |