rslidar_sdk v1.5.9 源代码解析
1 简介
rslidar_sdk是基于ROS/ROS2的雷达驱动。rslidar_sdk依赖rs_driver接收和解析MSOP/DIFOP Packet。
rslidar_sdk的基本功能如下:
从在线雷达或PCAP文件得到点云,通过ROS主题
/rslidar_points发布。使用者可以订阅这个主题,在rviz中看到点云。从在线雷达得到原始的MSOP/DIFOP Packet,通过ROS主题
/rslidar_packets发布。使用者可以订阅这个主题,将Packet记录到rosbag文件。从ROS主题
/rslidar_packets得到MSOP/DIFOP Packet,解析得到点云,再发布到主题/rslidar_points。这里的主题
/rslidar_packets,由使用者通过回放Packet rosbag文件发布。
2 Source 与 Destination
如前面所说,rslidar_sdk从在线雷达、PCAP文件、ROS主题这三种源得到MSOP/DIFOP Packet,将Packet发布到ROS主题/rslidar_packets,将点云发布到目标 - ROS主题/rslidar_points。
Source定义源接口
DestinationPointCloud定义发送点云的目标接口。
DestinationPacket定义发送MSOP/DIFOP Packet的目标接口。
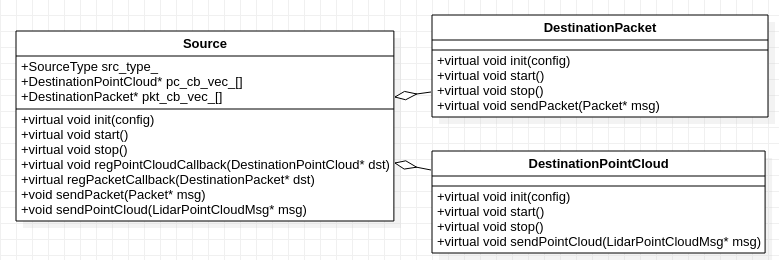
2.1 DestinationPointCloud
DestinationPointCloud定义发送点云的接口。
虚拟成员函数init()对DestinationPointCloud实例初始化
虚拟成员函数start()启动实例
虚拟成员函数sendPointCloud()发送PointCloud消息
2.2 DestinationPacket
DestinationPacket定义发送MSOP/DIFOP Packet的接口。
虚拟成员函数init()对DestinationPacket实例初始化
虚拟成员函数start()启动实例
虚拟成员函数sendPacket()启动发送Packet消息
2.3 Source
Source是定义源的接口。
成员
src_type_是源的类型enum SourceType { MSG_FROM_LIDAR = 1, MSG_FROM_ROS_PACKET = 2, MSG_FROM_PCAP = 3, };
成员
pc_cb_vec_[]中是一组DestinationPointCloud的实例。成员函数sendPointCloud()调用
point_cb_vec_[]中的实例,发送点云消息。
成员
pkt_cb_vec_[]中是一组DestinationPacket实例。成员函数sendPacket()将Packet消息发送到
pkt_cb_vec_[]中的实例中。
虚拟成员函数init()初始化Source实例
虚拟成员函数start()启动实例
虚拟成员函数regPointCloudCallback()将PointCloudDestination实例注册到
point_cb_vec_[]。虚拟成员函数regPacketCallback()将PacketDestination实例注册到
packet_cb_vec_[]。
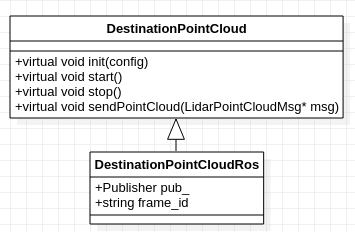
2.4 DestinationPointCloudRos
DestinationPointCloudRos在ROS主题/rslidar_points发布点云。
成员
pkt_pub_是ROS主题发布器。成员
frame_id_保存frame_id。frame_id是坐标系名字。
2.4.1 DestinationPointCloudRos::init()
init()初始化DestinationPointCloudRos实例。
从YAML文件读入用户配置参数。
读入
frame_id,保存在成员frame_id_,默认值是rslidar。读入ROS主题,保存在本地变量
ros_send_topic_,默认值是/rslidar_points。
创建ROS主题发布器,保存在成员
pkt_sub_.
2.4.2 DestinationPointCloudRos::sendPointCloud()
sendPacket()在ROS主题/rslidar_points发布点云。
调用Publisher::publish()发布ROS格式的点云消息。
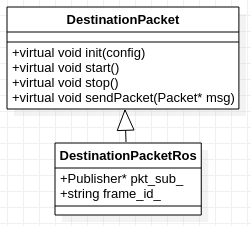
2.5 DestinationPacketRos
DestinationPacketRos在ROS主题/rslidar_packets发布MSOP/DIFOP Packet。
成员
pkt_sub_是ROS主题发布器。成员
frame_id_保存frame_id。frame_id是坐标系名字。
2.5.1 DestinationPacketRos::init()
init()初始化DestinationPacketRos实例。
从YAML文件读入用户配置参数。
读入
frame_id,保存在成员frame_id_,默认值是rslidar读入ROS主题,保存在本地变量
ros_send_topic_,默认值是/rslidar_packets。
创建ROS主题发布器,保存在成员
pkt_sub_.
2.5.2 DestinationPacketRos::sendPacket()
sendPacket()在ROS主题/rslidar_packets发布MOSP/DIFOP packet。
调用Publisher::publish()发布ROS格式的Packet消息。
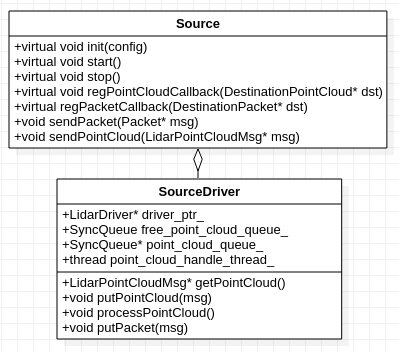
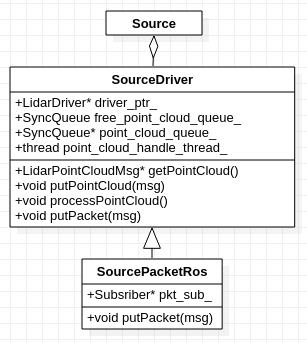
2.6 SourceDriver
SourceDriver从在线雷达和PCAP文件得到MSOP/DIFOP Packet,并解析得到点云。
成员
driver_ptr_是rs_driver驱动的实例,也就是LidarDriver。成员
free_point_cloud_queue_和point_cloud_queue_,分别是空闲点云的队列和待处理点云的队列。成员
point_cloud_handle_thread_是点云的处理线程。
2.6.1 SourceDriver::init()
init()初始化SourceDriver实例。
读取YAML配置文件,得到雷达的用户配置参数。
根据源类型,也就是成员
src_type_,创建相应类型的LidarDriver实例,也就是成员driver_ptr_。src_type_是在SourceDriver中的构造函数中指定的。
调用LidarDriver::regPointCloudCallback(),注册回调函数。这里是getPointCloud()和putPointCloud()。前者给
driver_ptr_提供空闲点云,后者从driver_ptr_得到填充好的点云。注意,这里没有注册MSOP/DIFOP Packet的回调函数,因为Packet是按需获取的。这时为了避免不必要地消耗CPU资源。
调用LidarDriver::init(),初始化
driver_ptr_。创建、启动点云处理线程
point_cloud_handle_thread_, 线程函数是processPointCloud()。
2.6.2 SourceDriver::getPointCloud()
getPointCloud()给成员driver_ptr_提供空闲的点云。
优先从成员
free_point_cloud_queue_得到点云。如果得不到,分配新的点云。
2.6.3 SourceDriver::putPointCloud()
putPointCloud()给从成员driver_ptr_得到填充好的点云。
将得到的点云推送到成员
point_cloud_queue_,等待处理。
2.6.4 SourceDriver::processPointCloud()
processPointCloud()处理点云。在while循环中,
从待处理点云的队列
point_cloud_queue_,得到点云,调用sendPointCloud(),其中调用成员
pc_cb_vec_[]中的DestinationPointCloud实例,发送点云。回收点云,放入空闲点云的队列
free_cloud_queue_,待下次使用。
2.6.5 SourceDriver::regPacketCallback()
regPacketCallback()用来注册DestinationPacket。
调用Source::regPacketCallback(),将DestinationPacket实例,加入成员
pkt_cb_vec_[]。如果这是首次要求Packet(
pkt_cb_vec_[]的第1个实例),调用LidarDriver::regPacketCallback(),向driver_ptr_注册Packet回调函数,开始接收Packet。回调函数是putPacket()。
2.6.6 SourceDriver::putPacket()
putPacket()调用sendPacket(),其中调用成员pkt_cb_vec_[]中的所有实例,发送MSOP/DIFOP Packet。
2.7 SourcePacketRos
SourcePacketRos在ROS主题/rslidar_packets得到MSOP/DIFOP Packet,解析后得到点云。
SourcePacketRos从SourceDriver派生,而不是直接从Source派生,是因为它用SourceDriver解析Packet得到点云。
成员
pkt_sub_,是ROS主题/rslidar_packets的订阅器。
2.7.1 SourcePacketRos::init()
init()初始化SourcePacketRos实例。
调用SourceDriver::init()初始化成员
driver_ptr_。在SourcePacketRos的构造函数中,SourceType设置为
SourceType::MSG_FROM_ROS_PACKET。这样,在SourceDriver::init()中,driver_ptr_的input_type就是InputType::RAW_PACKET,它通过LidarDriver::feedPacket接收Packet作为源。
解析YAML文件得到雷达的用户配置参数
得到接收Packet的主题,默认值为
/rslidar_packets。
创建Packet主题的订阅器,也就是成员
pkt_sub_,接收函数是putPacket()。
2.7.2 SourcePacketRos::putPacket()
putPacket()接收Packet,送到driver_ptr_解析。
调用LidarDriver::decodePacket(),将Packet喂给
driver_ptr_。点云的接收,使用SourceDriver的已有实现。
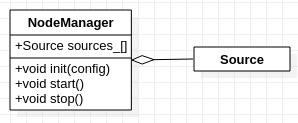
3 NodeManager
NodeManager管理Source实例,包括创建、初始化、启动、停止Source。它支持多个源,但是这些源的类型必须相同。
成员
sources_[]是一个Source实例的数组。
3.1 NodeManager::init()
init()初始化NodeManger实例。
从config.yaml文件得到用户配置参数
本地变量
msg_source,数据源类型本地变量
send_point_cloud_ros, 是否在ROS主题发送点云。本地变量
send_packet_ros,是否在ROS主题发送MSOP/DIFOP packet,
在.yaml文件中遍历数据源。在循环中,
根据
msg_source创建Source实例。如果是在线雷达(
SourceType::MSG_FROM_LIDAR),创建SourceDriver实例并初始化, 源类型为MSG_FROM_LIDAR。如果是PCAP文件(
SourceType::MSG_FROM_PCAP),创建SourceDriver实例并初始化,源类型为MSG_FROM_PCAP。如果是ROS主题(
SourceType::MSG_FROM_ROS_PACKET), 创建SourcePacketRos并初始化。SourcePacketRos构造函数已将源类型设置为MSG_FROM_ROS_PACKET
如果在ROS主题发送点云(
send_point_cloud_ros=true),则创建DestinationPointCloudRos实例、初始化,调用Source::regPointCloudCallback(),将它加入Source的pc_cb_vec_[]。如果在ROS主题发送Packet(
send_packet_ros=true),则创建DestinationPacketRos实例、初始化,调用Source::regPacketCallback()将它加入Source的pkt_cb_vec_[]。将Source实例,加入成员
sources_[]。
3.2 NodeManager::start()
start()启动成员sources_[]中的所有实例。