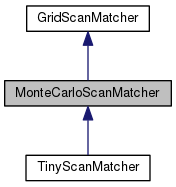
Scan Matcher based on the Monte Carlo method. The focus of the scan matcher is to compare a scan and a built map; in this class the method of scan comparison is performed by comparing corresponding scan costs. More...
#include <monte_carlo_scan_matcher.h>
Public Member Functions | |
| _failed_tries_limit (failed_iter) | |
| _total_tries_limit (max_iter) | |
| MonteCarloScanMatcher (std::shared_ptr< ScanCostEstimator > estimator, unsigned failed_iter, unsigned max_iter) | |
| Initializes the scan matcher with a certain scan cost estimator. | |
| virtual double | process_scan (const RobotState &init_pose, const TransformedLaserScan &scan, const GridMap &map, RobotState &pose_delta) override |
Protected Member Functions | |
| virtual unsigned | on_estimate_update (unsigned sample_num, unsigned sample_limit)=0 |
| virtual void | sample_pose (RobotState &base_pose)=0 |
Private Member Functions | |
| void | do_for_each_observer (std::function< void(ObsPtr)> op) |
Private Attributes | |
| unsigned | _failed_tries_limit |
| unsigned | _total_tries_limit |
Detailed Description
Scan Matcher based on the Monte Carlo method. The focus of the scan matcher is to compare a scan and a built map; in this class the method of scan comparison is performed by comparing corresponding scan costs.
Definition at line 30 of file monte_carlo_scan_matcher.h.
Constructor & Destructor Documentation
| MonteCarloScanMatcher::MonteCarloScanMatcher | ( | std::shared_ptr< ScanCostEstimator > | estimator, |
| unsigned | failed_iter, | ||
| unsigned | max_iter | ||
| ) | [inline] |
Initializes the scan matcher with a certain scan cost estimator.
- Parameters:
-
estimator An estimator of Scan Cost. failed_iter A limit of generated samples that have a higher cost comparing with the best estimated pose. max_iter A maximum number of hypothesis to be tested.
Definition at line 42 of file monte_carlo_scan_matcher.h.
Member Function Documentation
| MonteCarloScanMatcher::_failed_tries_limit | ( | failed_iter | ) |
| MonteCarloScanMatcher::_total_tries_limit | ( | max_iter | ) | [inline] |
Definition at line 45 of file monte_carlo_scan_matcher.h.
| void MonteCarloScanMatcher::do_for_each_observer | ( | std::function< void(ObsPtr)> | op | ) | [inline, private] |
Definition at line 129 of file monte_carlo_scan_matcher.h.
| virtual unsigned MonteCarloScanMatcher::on_estimate_update | ( | unsigned | sample_num, |
| unsigned | sample_limit | ||
| ) | [protected, pure virtual] |
A callback invoked when a better estimate is found.
- Parameters:
-
sample_num Amount of tries that were complited. sample_limit Totla amount of tries allowed.
Implemented in TinyScanMatcher.
| virtual double MonteCarloScanMatcher::process_scan | ( | const RobotState & | init_pose, |
| const TransformedLaserScan & | scan, | ||
| const GridMap & | map, | ||
| RobotState & | pose_delta | ||
| ) | [inline, override, virtual] |
Estimates the most probable position according to a given scan; the greater this probability, the lower cost of the scan.
- Parameters:
-
init_pose The first approxiamtion of pose. scan A current scan. map A current GridMap. pose_delta An output parameter of the best pose_delta.
- Returns:
- The lowest scan cost that corresponds to output pose_delta.
Implements GridScanMatcher.
Definition at line 56 of file monte_carlo_scan_matcher.h.
| virtual void MonteCarloScanMatcher::sample_pose | ( | RobotState & | base_pose | ) | [protected, pure virtual] |
Generates the pose of a robot in a vicinity of a base pose.
- Parameters:
-
base_pose A basical pose of a robot.
Implemented in TinyScanMatcher.
Member Data Documentation
unsigned MonteCarloScanMatcher::_failed_tries_limit [private] |
Definition at line 138 of file monte_carlo_scan_matcher.h.
unsigned MonteCarloScanMatcher::_total_tries_limit [private] |
Definition at line 139 of file monte_carlo_scan_matcher.h.
The documentation for this class was generated from the following file: