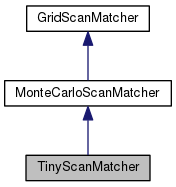
The scan matcher based on the Monte Carlo simulation. More...
#include <tiny_scan_matcher.h>
Public Member Functions | |
| virtual void | reset_state () override |
| TinyScanMatcher (ScePtr cost_estimator, unsigned bad_iter, unsigned max_iter, double sigma_coord, double sigma_angle) | |
Protected Member Functions | |
| virtual unsigned | on_estimate_update (unsigned sample_num, unsigned sample_limit) override |
| virtual void | sample_pose (RobotState &base_pose) override |
Private Attributes | |
| double | _curr_sigma_angle |
| double | _curr_sigma_coord |
| double | _sigma_angle |
| double | _sigma_coord |
Detailed Description
The scan matcher based on the Monte Carlo simulation.
The robot pose is updated by shifting it on a random vector and rotation by a random angle. The vector distribution is dynamically adjusted.
Definition at line 15 of file tiny_scan_matcher.h.
Constructor & Destructor Documentation
| TinyScanMatcher::TinyScanMatcher | ( | ScePtr | cost_estimator, |
| unsigned | bad_iter, | ||
| unsigned | max_iter, | ||
| double | sigma_coord, | ||
| double | sigma_angle | ||
| ) | [inline] |
Initializes the scan matcher.
- Parameters:
-
[in] cost_estimator - the type of estimator for the robot location. [in] bad_iter,max_iter - see failed_iter, max_iter in MonteCarloScanMatcher [in] sigma_coord,sigma_angle - the  value of a normal distribution for the random variables. (
value of a normal distribution for the random variables. (  ,
,  and
and  ).
).
Definition at line 28 of file tiny_scan_matcher.h.
Member Function Documentation
| virtual unsigned TinyScanMatcher::on_estimate_update | ( | unsigned | sample_num, |
| unsigned | sample_limit | ||
| ) | [inline, override, protected, virtual] |
A callback invoked when a better estimate is found.
- Parameters:
-
sample_num Amount of tries that were complited. sample_limit Totla amount of tries allowed.
Implements MonteCarloScanMatcher.
Definition at line 54 of file tiny_scan_matcher.h.
| virtual void TinyScanMatcher::reset_state | ( | ) | [inline, override, virtual] |
Resets the scan matcher to the state it had right after the initialization.
Reimplemented from GridScanMatcher.
Definition at line 37 of file tiny_scan_matcher.h.
| virtual void TinyScanMatcher::sample_pose | ( | RobotState & | base_pose | ) | [inline, override, protected, virtual] |
Generates the pose of a robot in a vicinity of a base pose.
- Parameters:
-
base_pose A basical pose of a robot.
Implements MonteCarloScanMatcher.
Definition at line 43 of file tiny_scan_matcher.h.
Member Data Documentation
double TinyScanMatcher::_curr_sigma_angle [private] |
Definition at line 67 of file tiny_scan_matcher.h.
double TinyScanMatcher::_curr_sigma_coord [private] |
Definition at line 67 of file tiny_scan_matcher.h.
double TinyScanMatcher::_sigma_angle [private] |
Definition at line 66 of file tiny_scan_matcher.h.
double TinyScanMatcher::_sigma_coord [private] |
Definition at line 66 of file tiny_scan_matcher.h.
The documentation for this class was generated from the following file: