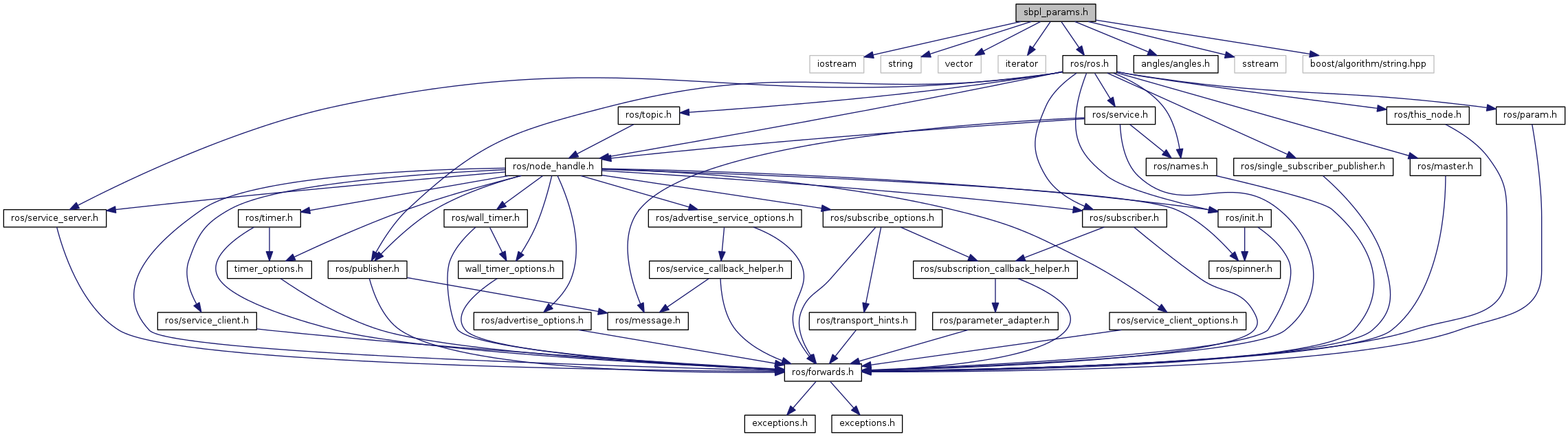
#include <iostream>#include <string>#include <vector>#include <iterator>#include <ros/ros.h>#include <angles/angles.h>#include <sstream>#include <boost/algorithm/string.hpp>
Include dependency graph for sbpl_params.h:
Go to the source code of this file.
Classes | |
| struct | sbpl_interface::MotionPrimitive |
| class | sbpl_interface::SBPLParams |
Namespaces | |
| namespace | sbpl_interface |
Defines | |
| #define | DEG2RAD(d) ((d)*(M_PI/180.0)) |
| #define | RAD2DEG(r) ((r)*(180.0/M_PI)) |
Typedefs | |
| typedef std::vector< int > | sbpl_interface::Coords |
| typedef std::vector < std::vector< double > > | sbpl_interface::MPrim |
Define Documentation
Definition at line 51 of file sbpl_params.h.