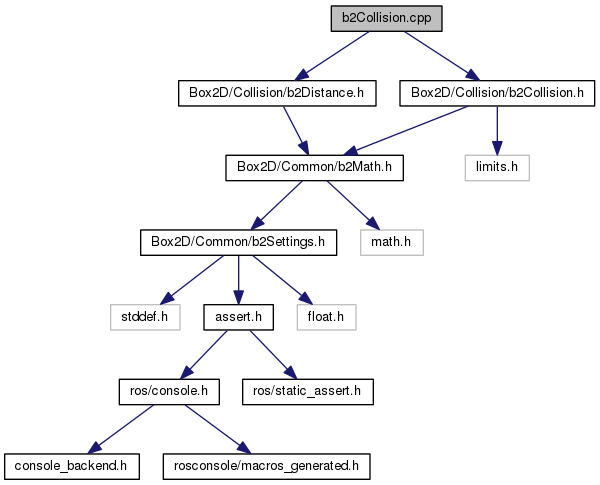
Include dependency graph for b2Collision.cpp:
Go to the source code of this file.
Functions | |
| int32 | b2ClipSegmentToLine (b2ClipVertex vOut[2], const b2ClipVertex vIn[2], const b2Vec2 &normal, float32 offset, int32 vertexIndexA) |
| Clipping for contact manifolds. | |
| void | b2GetPointStates (b2PointState state1[b2_maxManifoldPoints], b2PointState state2[b2_maxManifoldPoints], const b2Manifold *manifold1, const b2Manifold *manifold2) |
| bool | b2TestOverlap (const b2Shape *shapeA, int32 indexA, const b2Shape *shapeB, int32 indexB, const b2Transform &xfA, const b2Transform &xfB) |
| Determine if two generic shapes overlap. | |
Function Documentation
| int32 b2ClipSegmentToLine | ( | b2ClipVertex | vOut[2], |
| const b2ClipVertex | vIn[2], | ||
| const b2Vec2 & | normal, | ||
| float32 | offset, | ||
| int32 | vertexIndexA | ||
| ) |
Clipping for contact manifolds.
Definition at line 201 of file b2Collision.cpp.
| void b2GetPointStates | ( | b2PointState | state1[b2_maxManifoldPoints], |
| b2PointState | state2[b2_maxManifoldPoints], | ||
| const b2Manifold * | manifold1, | ||
| const b2Manifold * | manifold2 | ||
| ) |
Compute the point states given two manifolds. The states pertain to the transition from manifold1 to manifold2. So state1 is either persist or remove while state2 is either add or persist.
Definition at line 88 of file b2Collision.cpp.
| bool b2TestOverlap | ( | const b2Shape * | shapeA, |
| int32 | indexA, | ||
| const b2Shape * | shapeB, | ||
| int32 | indexB, | ||
| const b2Transform & | xfA, | ||
| const b2Transform & | xfB | ||
| ) |
Determine if two generic shapes overlap.
Definition at line 233 of file b2Collision.cpp.