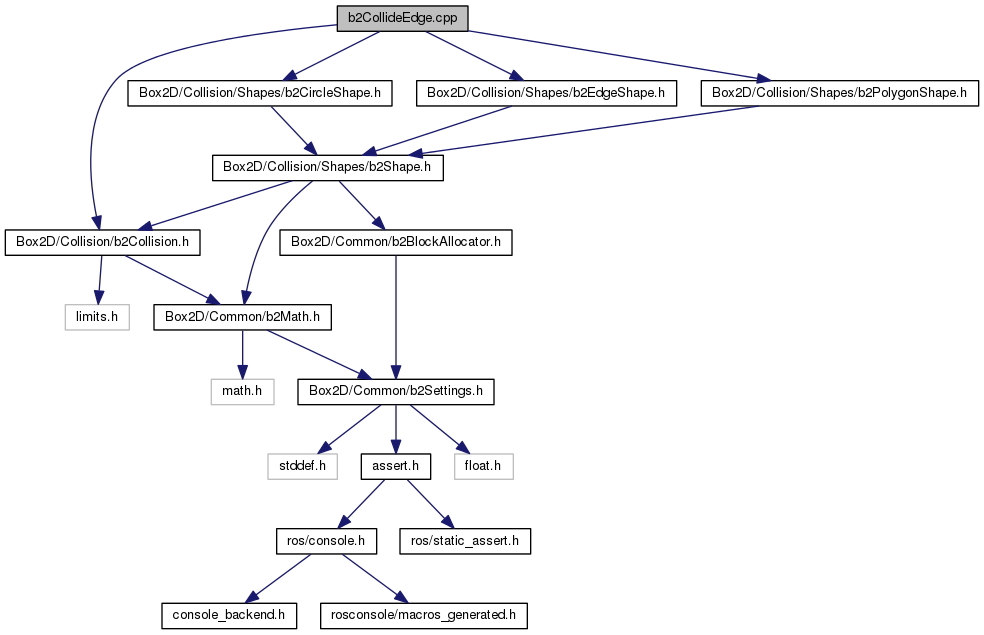
#include <Box2D/Collision/b2Collision.h>#include <Box2D/Collision/Shapes/b2CircleShape.h>#include <Box2D/Collision/Shapes/b2EdgeShape.h>#include <Box2D/Collision/Shapes/b2PolygonShape.h>
Include dependency graph for b2CollideEdge.cpp:
Go to the source code of this file.
Classes | |
| struct | b2EPAxis |
| struct | b2EPCollider |
| struct | b2ReferenceFace |
| struct | b2TempPolygon |
Functions | |
| void | b2CollideEdgeAndCircle (b2Manifold *manifold, const b2EdgeShape *edgeA, const b2Transform &xfA, const b2CircleShape *circleB, const b2Transform &xfB) |
| Compute the collision manifold between an edge and a circle. | |
| void | b2CollideEdgeAndPolygon (b2Manifold *manifold, const b2EdgeShape *edgeA, const b2Transform &xfA, const b2PolygonShape *polygonB, const b2Transform &xfB) |
| Compute the collision manifold between an edge and a circle. | |
Function Documentation
| void b2CollideEdgeAndCircle | ( | b2Manifold * | manifold, |
| const b2EdgeShape * | edgeA, | ||
| const b2Transform & | xfA, | ||
| const b2CircleShape * | circleB, | ||
| const b2Transform & | xfB | ||
| ) |
Compute the collision manifold between an edge and a circle.
Definition at line 27 of file b2CollideEdge.cpp.
| void b2CollideEdgeAndPolygon | ( | b2Manifold * | manifold, |
| const b2EdgeShape * | edgeA, | ||
| const b2Transform & | xfA, | ||
| const b2PolygonShape * | polygonB, | ||
| const b2Transform & | xfB | ||
| ) |
Compute the collision manifold between an edge and a circle.
Definition at line 692 of file b2CollideEdge.cpp.