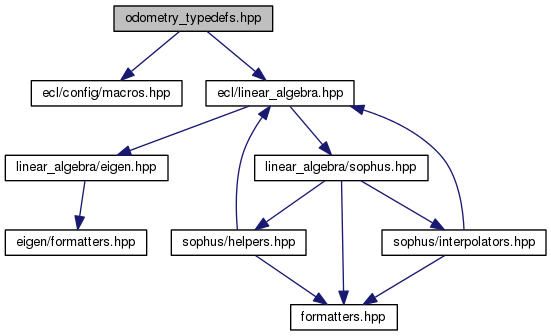
Include dependency graph for odometry_typedefs.hpp:
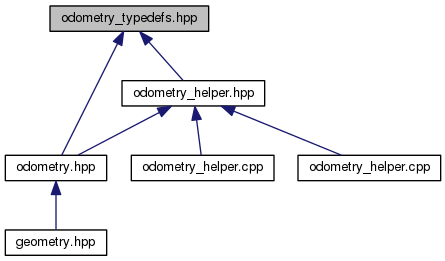
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | ecl |
Embedded control libraries. | |
| namespace | ecl::odometry |
Typedefs | |
| typedef Eigen::Matrix< float, 6, 1 > | ecl::odometry::Odom2D |
| Float representation of 2D odometry (x, y, heading, v_x, v_y, w). | |
| typedef Eigen::Matrix< float, 6, Eigen::Dynamic > | ecl::odometry::Odom2DTrajectory |
| Float collection of 2D odometries (x, y, heading, v_x, v_y, w). | |
| typedef Eigen::Matrix2Xf | ecl::odometry::Path2D |
| Float representation of a path in 2D (x1,y1; x2,y2; ..; xn,yn). | |
| typedef Eigen::Vector3f | ecl::odometry::Pose2D |
| Float representation of a pose in 2D (x, y, heading). | |
| typedef Eigen::Vector2f | ecl::odometry::Position2D |
| Float representation for a 2D position (x-, y-position). | |
| typedef Eigen::Matrix3Xf | ecl::odometry::Trajectory2D |
| Float representation of a trajectory in 2D (poses in 2D). | |
| typedef Eigen::Vector3f | ecl::odometry::Twist2D |
| Float representation of velocities in 2D (v_x, v_y, w). | |
| typedef Eigen::Matrix3Xf | ecl::odometry::Twist2DVector |
| Float collection of 2D twists (twist: v_x, v_y, w). | |
Detailed Description
Definition in file odometry_typedefs.hpp.