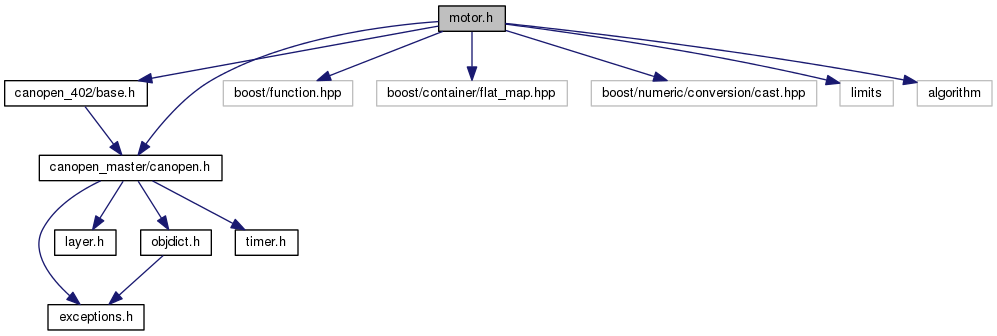
#include <canopen_402/base.h>#include <canopen_master/canopen.h>#include <boost/function.hpp>#include <boost/container/flat_map.hpp>#include <boost/numeric/conversion/cast.hpp>#include <limits>#include <algorithm>
Include dependency graph for motor.h:
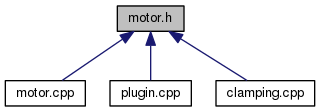
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | canopen::Motor402::Allocator |
| class | canopen::Command402 |
| class | canopen::DefaultHomingMode |
| class | canopen::HomingMode |
| class | canopen::Mode |
| class | canopen::ModeForwardHelper< ID, TYPE, OBJ, SUB, CW_MASK > |
| class | canopen::ModeTargetHelper< T > |
| class | canopen::Motor402 |
| struct | canopen::Command402::Op |
| class | canopen::ProfiledPositionMode |
| class | canopen::State402 |
| class | canopen::Command402::TransitionTable |
| class | canopen::WordAccessor< MASK > |
Namespaces | |
| namespace | canopen |
Typedefs | |
| typedef ModeForwardHelper < MotorBase::Cyclic_Synchronous_Position, int32_t, 0x607A, 0, 0 > | canopen::CyclicSynchronousPositionMode |
| typedef ModeForwardHelper < MotorBase::Cyclic_Synchronous_Torque, int16_t, 0x6071, 0, 0 > | canopen::CyclicSynchronousTorqueMode |
| typedef ModeForwardHelper < MotorBase::Cyclic_Synchronous_Velocity, int32_t, 0x60FF, 0, 0 > | canopen::CyclicSynchronousVelocityMode |
| typedef ModeForwardHelper < MotorBase::Interpolated_Position, int32_t, 0x60C1, 0x01,(1<< Command402::CW_Operation_mode_specific0)> | canopen::InterpolatedPositionMode |
| typedef ModeForwardHelper < MotorBase::Profiled_Torque, int16_t, 0x6071, 0, 0 > | canopen::ProfiledTorqueMode |
| typedef ModeForwardHelper < MotorBase::Profiled_Velocity, int32_t, 0x60FF, 0, 0 > | canopen::ProfiledVelocityMode |
| typedef ModeForwardHelper < MotorBase::Velocity, int16_t, 0x6042, 0,(1<< Command402::CW_Operation_mode_specific0)|(1<< Command402::CW_Operation_mode_specific1)|(1<< Command402::CW_Operation_mode_specific2)> | canopen::VelocityMode |