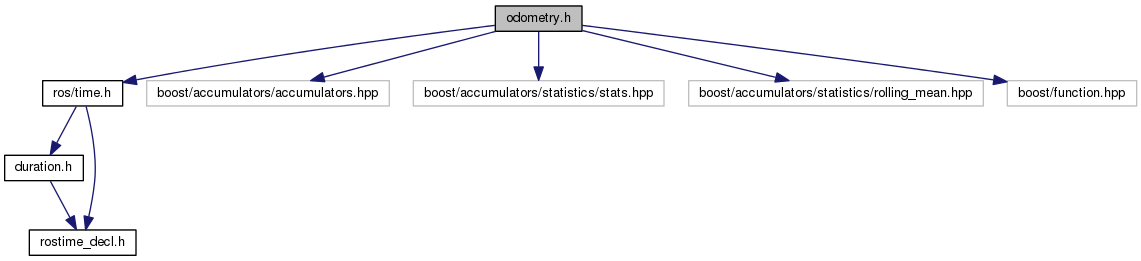
#include <ros/time.h>#include <boost/accumulators/accumulators.hpp>#include <boost/accumulators/statistics/stats.hpp>#include <boost/accumulators/statistics/rolling_mean.hpp>#include <boost/function.hpp>
Include dependency graph for odometry.h:
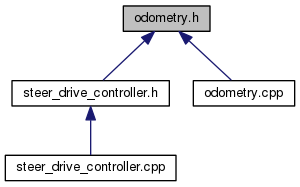
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | steer_drive_controller::Odometry |
| The Odometry class handles odometry readings (2D pose and velocity with related timestamp) More... | |
Namespaces | |
| namespace | steer_drive_controller |