#include <steer_bot_hardware_gazebo.h>
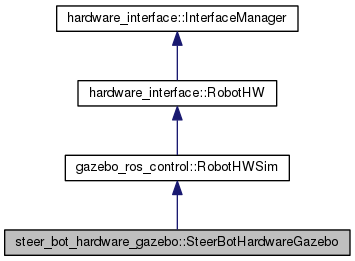
Detailed Description
Definition at line 66 of file steer_bot_hardware_gazebo.h.
Member Enumeration Documentation
anonymous enum [private] |
Definition at line 110 of file steer_bot_hardware_gazebo.h.
Constructor & Destructor Documentation
Definition at line 54 of file steer_bot_hardware_gazebo.cpp.
Member Function Documentation
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::CleanUp | ( | ) | [private] |
Definition at line 277 of file steer_bot_hardware_gazebo.cpp.
| double steer_bot_hardware_gazebo::SteerBotHardwareGazebo::ComputeEffCommandFromVelError | ( | const int | _index, |
| ros::Duration | _period | ||
| ) | [private] |
Definition at line 447 of file steer_bot_hardware_gazebo.cpp.
| std::string steer_bot_hardware_gazebo::SteerBotHardwareGazebo::containerToString | ( | const T & | cont, |
| const std::string & | prefix | ||
| ) | [inline, private] |
Definition at line 198 of file steer_bot_hardware_gazebo.h.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::GetCurrentState | ( | std::vector< double > & | _jnt_pos, |
| std::vector< double > & | _jnt_vel, | ||
| std::vector< double > & | _jnt_eff, | ||
| const int | _if_index, | ||
| const int | _sim_jnt_index | ||
| ) | [private] |
Definition at line 468 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::GetJointNames | ( | ros::NodeHandle & | _nh | ) | [private] |
Definition at line 315 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::GetSteerJointNames | ( | ros::NodeHandle & | _nh | ) | [private] |
Definition at line 343 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::GetWheelJointNames | ( | ros::NodeHandle & | _nh | ) | [private] |
Definition at line 321 of file steer_bot_hardware_gazebo.cpp.
| bool steer_bot_hardware_gazebo::SteerBotHardwareGazebo::initSim | ( | const std::string & | robot_namespace, |
| ros::NodeHandle | model_nh, | ||
| gazebo::physics::ModelPtr | parent_model, | ||
| const urdf::Model *const | urdf_model, | ||
| std::vector< transmission_interface::TransmissionInfo > | transmissions | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 61 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::readSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 137 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::RegisterCommandJointInterfaceHandle | ( | hardware_interface::JointStateInterface & | _jnt_state_interface, |
| hardware_interface::JointCommandInterface & | _jnt_cmd_interface, | ||
| const std::string | _jnt_name, | ||
| double & | _jnt_cmd | ||
| ) | [private] |
Definition at line 433 of file steer_bot_hardware_gazebo.cpp.
Definition at line 358 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::RegisterInterfaceHandles | ( | hardware_interface::JointStateInterface & | _jnt_state_interface, |
| hardware_interface::JointCommandInterface & | _jnt_cmd_interface, | ||
| const std::string | _jnt_name, | ||
| double & | _jnt_pos, | ||
| double & | _jnt_vel, | ||
| double & | _jnt_eff, | ||
| double & | _jnt_cmd | ||
| ) | [private] |
Definition at line 369 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::RegisterJointStateInterfaceHandle | ( | hardware_interface::JointStateInterface & | _jnt_state_interface, |
| const std::string | _jnt_name, | ||
| double & | _jnt_pos, | ||
| double & | _jnt_vel, | ||
| double & | _jnt_eff | ||
| ) | [private] |
Definition at line 420 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::RegisterSteerInterface | ( | ) | [private] |
Definition at line 404 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::RegisterWheelInterface | ( | ) | [private] |
Definition at line 381 of file steer_bot_hardware_gazebo.cpp.
| void steer_bot_hardware_gazebo::SteerBotHardwareGazebo::writeSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 179 of file steer_bot_hardware_gazebo.cpp.
Member Data Documentation
Definition at line 191 of file steer_bot_hardware_gazebo.h.
Definition at line 171 of file steer_bot_hardware_gazebo.h.
std::string steer_bot_hardware_gazebo::SteerBotHardwareGazebo::front_steer_jnt_name_ [private] |
Definition at line 167 of file steer_bot_hardware_gazebo.h.
Definition at line 169 of file steer_bot_hardware_gazebo.h.
Definition at line 173 of file steer_bot_hardware_gazebo.h.
hardware_interface::PositionJointInterface steer_bot_hardware_gazebo::SteerBotHardwareGazebo::front_steer_jnt_pos_cmd_interface_ [private] |
Definition at line 175 of file steer_bot_hardware_gazebo.h.
Definition at line 170 of file steer_bot_hardware_gazebo.h.
hardware_interface::VelocityJointInterface steer_bot_hardware_gazebo::SteerBotHardwareGazebo::front_wheel_jnt_vel_cmd_interface_ [private] |
Definition at line 188 of file steer_bot_hardware_gazebo.h.
joint_limits_interface::PositionJointSoftLimitsInterface steer_bot_hardware_gazebo::SteerBotHardwareGazebo::jnt_limits_interface_ [private] |
Definition at line 119 of file steer_bot_hardware_gazebo.h.
hardware_interface::JointStateInterface steer_bot_hardware_gazebo::SteerBotHardwareGazebo::jnt_state_interface_ [private] |
Definition at line 129 of file steer_bot_hardware_gazebo.h.
Definition at line 195 of file steer_bot_hardware_gazebo.h.
unsigned int steer_bot_hardware_gazebo::SteerBotHardwareGazebo::n_dof_ [private] |
Definition at line 115 of file steer_bot_hardware_gazebo.h.
Definition at line 125 of file steer_bot_hardware_gazebo.h.
std::string steer_bot_hardware_gazebo::SteerBotHardwareGazebo::ns_ [private] |
Definition at line 126 of file steer_bot_hardware_gazebo.h.
std::vector<control_toolbox::Pid> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::pids_ [private] |
Definition at line 122 of file steer_bot_hardware_gazebo.h.
Definition at line 138 of file steer_bot_hardware_gazebo.h.
std::string steer_bot_hardware_gazebo::SteerBotHardwareGazebo::rear_wheel_jnt_name_ [private] |
Definition at line 134 of file steer_bot_hardware_gazebo.h.
Definition at line 136 of file steer_bot_hardware_gazebo.h.
Definition at line 137 of file steer_bot_hardware_gazebo.h.
Definition at line 140 of file steer_bot_hardware_gazebo.h.
hardware_interface::VelocityJointInterface steer_bot_hardware_gazebo::SteerBotHardwareGazebo::rear_wheel_jnt_vel_cmd_interface_ [private] |
Definition at line 142 of file steer_bot_hardware_gazebo.h.
std::vector<gazebo::physics::JointPtr> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::sim_joints_ [private] |
Definition at line 116 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_steer_jnt_eff_ [private] |
Definition at line 184 of file steer_bot_hardware_gazebo.h.
std::vector<std::string> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_steer_jnt_names_ [private] |
Definition at line 180 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_steer_jnt_pos_ [private] |
Definition at line 182 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_steer_jnt_pos_cmd_ [private] |
Definition at line 186 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_steer_jnt_vel_ [private] |
Definition at line 183 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_wheel_jnt_eff_ [private] |
Definition at line 160 of file steer_bot_hardware_gazebo.h.
std::vector<std::string> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_wheel_jnt_names_ [private] |
Definition at line 156 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_wheel_jnt_pos_ [private] |
Definition at line 158 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_wheel_jnt_vel_ [private] |
Definition at line 159 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_front_wheel_jnt_vel_cmd_ [private] |
Definition at line 162 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_rear_wheel_jnt_eff_ [private] |
Definition at line 151 of file steer_bot_hardware_gazebo.h.
std::vector<std::string> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_rear_wheel_jnt_names_ [private] |
Definition at line 147 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_rear_wheel_jnt_pos_ [private] |
Definition at line 149 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_rear_wheel_jnt_vel_ [private] |
Definition at line 150 of file steer_bot_hardware_gazebo.h.
std::vector<double> steer_bot_hardware_gazebo::SteerBotHardwareGazebo::virtual_rear_wheel_jnt_vel_cmd_ [private] |
Definition at line 153 of file steer_bot_hardware_gazebo.h.
Definition at line 193 of file steer_bot_hardware_gazebo.h.
Definition at line 192 of file steer_bot_hardware_gazebo.h.
The documentation for this class was generated from the following files: