#include <effort_display.h>
Public Member Functions | |
| EffortDisplay () | |
| virtual void | onInitialize () |
| Override this function to do subclass-specific initialization. | |
| virtual void | reset () |
| Called to tell the display to clear its state. | |
| virtual | ~EffortDisplay () |
Protected Member Functions | |
| void | clear () |
| void | load () |
| virtual void | onDisable () |
| Derived classes override this to do the actual work of disabling themselves. | |
| virtual void | onEnable () |
| Derived classes override this to do the actual work of enabling themselves. | |
Protected Attributes | |
| std::string | robot_description_ |
| boost::shared_ptr< urdf::Model > | robot_model_ |
Private Types | |
| typedef std::map< std::string, JointInfo * > | M_JointInfo |
Private Slots | |
| JointInfo * | createJoint (const std::string &joint) |
| JointInfo * | getJointInfo (const std::string &joint) |
| void | updateColorAndAlpha () |
| void | updateHistoryLength () |
| void | updateRobotDescription () |
Private Member Functions | |
| void | processMessage (const sensor_msgs::JointState::ConstPtr &msg) |
| Implement this to process the contents of a message. | |
Private Attributes | |
| rviz::BoolProperty * | all_enabled_property_ |
| rviz::FloatProperty * | alpha_property_ |
| rviz::IntProperty * | history_length_property_ |
| M_JointInfo | joints_ |
| rviz::Property * | joints_category_ |
| rviz::StringProperty * | robot_description_property_ |
| rviz::FloatProperty * | scale_property_ |
| boost::circular_buffer < boost::shared_ptr < EffortVisual > > | visuals_ |
| rviz::FloatProperty * | width_property_ |
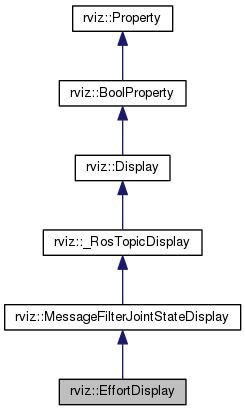
Detailed Description
Definition at line 677 of file effort_display.h.
Member Typedef Documentation
typedef std::map<std::string, JointInfo*> rviz::EffortDisplay::M_JointInfo [private] |
Definition at line 721 of file effort_display.h.
Constructor & Destructor Documentation
Definition at line 81 of file effort_display.cpp.
| rviz::EffortDisplay::~EffortDisplay | ( | ) | [virtual] |
Definition at line 122 of file effort_display.cpp.
Member Function Documentation
| void rviz::EffortDisplay::clear | ( | ) | [protected] |
Definition at line 134 of file effort_display.cpp.
| JointInfo * rviz::EffortDisplay::createJoint | ( | const std::string & | joint | ) | [private, slot] |
Definition at line 73 of file effort_display.cpp.
| JointInfo * rviz::EffortDisplay::getJointInfo | ( | const std::string & | joint | ) | [private, slot] |
Definition at line 62 of file effort_display.cpp.
| void rviz::EffortDisplay::load | ( | ) | [protected] |
Definition at line 168 of file effort_display.cpp.
| void rviz::EffortDisplay::onDisable | ( | ) | [protected, virtual] |
Derived classes override this to do the actual work of disabling themselves.
Reimplemented from rviz::MessageFilterJointStateDisplay.
Definition at line 229 of file effort_display.cpp.
| void rviz::EffortDisplay::onEnable | ( | ) | [protected, virtual] |
Derived classes override this to do the actual work of enabling themselves.
Reimplemented from rviz::MessageFilterJointStateDisplay.
Definition at line 224 of file effort_display.cpp.
| void rviz::EffortDisplay::onInitialize | ( | ) | [virtual] |
Override this function to do subclass-specific initialization.
This is called after vis_manager_ and scene_manager_ are set, and before load() or setEnabled().
setName() may or may not have been called before this.
Reimplemented from rviz::MessageFilterJointStateDisplay.
Definition at line 116 of file effort_display.cpp.
| void rviz::EffortDisplay::processMessage | ( | const sensor_msgs::JointState::ConstPtr & | msg | ) | [private, virtual] |
Implement this to process the contents of a message.
This is called by incomingMessage().
Implements rviz::MessageFilterJointStateDisplay.
Definition at line 268 of file effort_display.cpp.
| void rviz::EffortDisplay::reset | ( | ) | [virtual] |
Called to tell the display to clear its state.
Reimplemented from rviz::MessageFilterJointStateDisplay.
Definition at line 128 of file effort_display.cpp.
| void rviz::EffortDisplay::updateColorAndAlpha | ( | ) | [private, slot] |
Definition at line 141 of file effort_display.cpp.
| void rviz::EffortDisplay::updateHistoryLength | ( | ) | [private, slot] |
Definition at line 163 of file effort_display.cpp.
| void rviz::EffortDisplay::updateRobotDescription | ( | ) | [private, slot] |
Definition at line 153 of file effort_display.cpp.
Member Data Documentation
Definition at line 730 of file effort_display.h.
Definition at line 725 of file effort_display.h.
Definition at line 726 of file effort_display.h.
M_JointInfo rviz::EffortDisplay::joints_ [private] |
Definition at line 722 of file effort_display.h.
Definition at line 729 of file effort_display.h.
std::string rviz::EffortDisplay::robot_description_ [protected] |
Definition at line 712 of file effort_display.h.
Definition at line 728 of file effort_display.h.
boost::shared_ptr<urdf::Model> rviz::EffortDisplay::robot_model_ [protected] |
Definition at line 709 of file effort_display.h.
Definition at line 725 of file effort_display.h.
boost::circular_buffer<boost::shared_ptr<EffortVisual> > rviz::EffortDisplay::visuals_ [private] |
Definition at line 719 of file effort_display.h.
Definition at line 725 of file effort_display.h.
The documentation for this class was generated from the following files: