#include <gtest/gtest.h>#include <ros/ros.h>#include <sensor_msgs/NavSatFix.h>#include <sensor_msgs/Imu.h>#include <geometry_msgs/TwistWithCovarianceStamped.h>#include <tf/LinearMath/Quaternion.h>#include <arpa/inet.h>#include <sys/socket.h>#include "MsgRx.h"#include "../src/dispatch.h"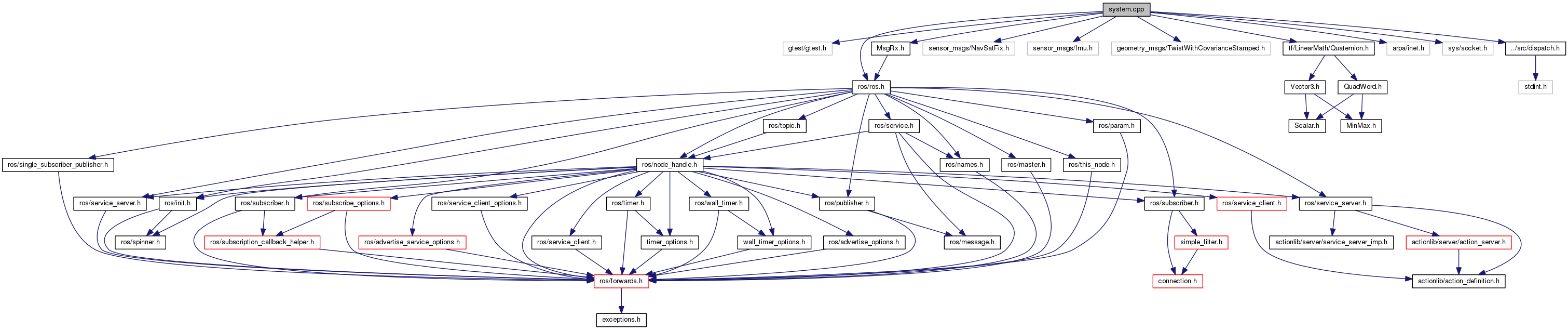
Go to the source code of this file.
Functions | |
| static void | fixPacket (Packet &packet) |
| int | main (int argc, char **argv) |
| void | recvClear () |
| void | recvGpsFix (const sensor_msgs::NavSatFix::ConstPtr &msg) |
| void | recvGpsVel (const geometry_msgs::TwistWithCovarianceStamped::ConstPtr &msg) |
| void | recvImuData (const sensor_msgs::Imu::ConstPtr &msg) |
| static bool | sendPacket (const Packet &packet) |
| static double | SQUARE (double x) |
| TEST (Main, topics) | |
| TEST (Main, packets) | |
| TEST (Main, header) | |
| TEST (Main, fix) | |
| TEST (Main, vel) | |
| TEST (Main, imu) | |
| static bool | waitForMsgs (ros::WallDuration dur) |
| static bool | waitForTopics (ros::WallDuration dur) |
Variables | |
| std::string | g_frame_id_gps = "gps" |
| std::string | g_frame_id_odom = "base_footprint" |
| std::string | g_frame_id_vel = "enu" |
| std::string | g_ip_address = "" |
| MsgRx< sensor_msgs::NavSatFix > | g_msg_fix |
| MsgRx< sensor_msgs::Imu > | g_msg_imu |
| MsgRx < geometry_msgs::TwistWithCovarianceStamped > | g_msg_vel |
| int | g_port = 3000 |
| ros::Subscriber | g_sub_fix |
| ros::Subscriber | g_sub_imu |
| ros::Subscriber | g_sub_vel |
Function Documentation
Definition at line 54 of file system.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 509 of file system.cpp.
| void recvClear | ( | ) |
Definition at line 42 of file system.cpp.
| void recvGpsFix | ( | const sensor_msgs::NavSatFix::ConstPtr & | msg | ) |
Definition at line 49 of file system.cpp.
| void recvGpsVel | ( | const geometry_msgs::TwistWithCovarianceStamped::ConstPtr & | msg | ) |
Definition at line 50 of file system.cpp.
| void recvImuData | ( | const sensor_msgs::Imu::ConstPtr & | msg | ) |
Definition at line 51 of file system.cpp.
| static bool sendPacket | ( | const Packet & | packet | ) | [static] |
Definition at line 73 of file system.cpp.
| static double SQUARE | ( | double | x | ) | [inline, static] |
Definition at line 94 of file system.cpp.
| TEST | ( | Main | , |
| topics | |||
| ) |
Definition at line 125 of file system.cpp.
| TEST | ( | Main | , |
| packets | |||
| ) |
Definition at line 137 of file system.cpp.
Definition at line 170 of file system.cpp.
| TEST | ( | Main | , |
| fix | |||
| ) |
Definition at line 196 of file system.cpp.
| TEST | ( | Main | , |
| vel | |||
| ) |
Definition at line 320 of file system.cpp.
| TEST | ( | Main | , |
| imu | |||
| ) |
Definition at line 390 of file system.cpp.
| static bool waitForMsgs | ( | ros::WallDuration | dur | ) | [static] |
Definition at line 110 of file system.cpp.
| static bool waitForTopics | ( | ros::WallDuration | dur | ) | [static] |
Definition at line 95 of file system.cpp.
Variable Documentation
| std::string g_frame_id_gps = "gps" |
Definition at line 29 of file system.cpp.
| std::string g_frame_id_odom = "base_footprint" |
Definition at line 31 of file system.cpp.
| std::string g_frame_id_vel = "enu" |
Definition at line 30 of file system.cpp.
| std::string g_ip_address = "" |
Definition at line 27 of file system.cpp.
Definition at line 39 of file system.cpp.
Definition at line 41 of file system.cpp.
Definition at line 40 of file system.cpp.
| int g_port = 3000 |
Definition at line 28 of file system.cpp.
Definition at line 34 of file system.cpp.
Definition at line 36 of file system.cpp.
Definition at line 35 of file system.cpp.