#include <ControllerBase.h>
Classes | |
| struct | TeleopInput |
| struct | TeleopOutput |
Public Member Functions | |
| virtual bool | setTwistCommand (const double vx, const double wz) |
| virtual void | teleop_interface (const TeleopInput &in, TeleopOutput &out) |
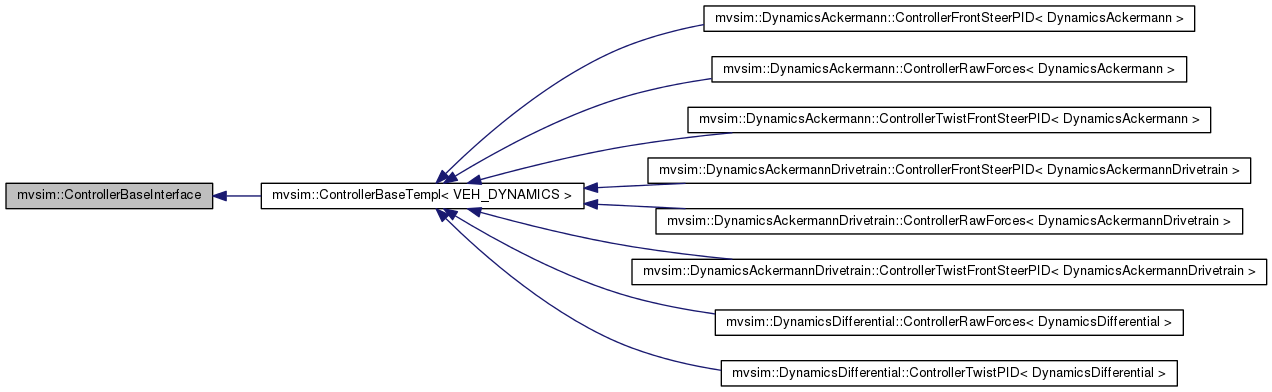
Detailed Description
Interface of ControllerBaseTempl<> for teleoperation, etc. Abstract interface common to any vehicle type & any controller.
Definition at line 19 of file ControllerBase.h.
Member Function Documentation
| virtual bool mvsim::ControllerBaseInterface::setTwistCommand | ( | const double | vx, |
| const double | wz | ||
| ) | [inline, virtual] |
Accept a Twist command.
- Returns:
- true if the controller supports this kind of commands, false otherwise
Reimplemented in mvsim::DynamicsAckermannDrivetrain::ControllerTwistFrontSteerPID, mvsim::DynamicsAckermann::ControllerTwistFrontSteerPID, and mvsim::DynamicsDifferential::ControllerTwistPID.
Definition at line 37 of file ControllerBase.h.
| virtual void mvsim::ControllerBaseInterface::teleop_interface | ( | const TeleopInput & | in, |
| TeleopOutput & | out | ||
| ) | [inline, virtual] |
Reimplemented in mvsim::DynamicsAckermannDrivetrain::ControllerFrontSteerPID, mvsim::DynamicsAckermann::ControllerFrontSteerPID, mvsim::DynamicsAckermannDrivetrain::ControllerTwistFrontSteerPID, mvsim::DynamicsAckermann::ControllerTwistFrontSteerPID, mvsim::DynamicsAckermannDrivetrain::ControllerRawForces, mvsim::DynamicsAckermann::ControllerRawForces, mvsim::DynamicsDifferential::ControllerTwistPID, mvsim::DynamicsDifferential::ControllerRawForces, and mvsim::ControllerBaseTempl< VEH_DYNAMICS >.
Definition at line 32 of file ControllerBase.h.
The documentation for this class was generated from the following file: