#include <VehicleAckermann.h>
Public Member Functions | |
| virtual void | control_step (const DynamicsAckermann::TControllerInput &ci, DynamicsAckermann::TControllerOutput &co) |
| ControllerFrontSteerPID (DynamicsAckermann &veh) | |
| virtual void | load_config (const rapidxml::xml_node< char > &node) |
| virtual void | teleop_interface (const TeleopInput &in, TeleopOutput &out) |
Static Public Member Functions | |
| static const char * | class_name () |
Public Attributes | |
| double | KD |
| PID controller parameters. | |
| double | KI |
| double | KP |
| double | max_torque |
| Maximum abs. value torque (for clamp) [Nm]. | |
| double | setpoint_lin_speed |
| double | setpoint_steer_ang |
Private Attributes | |
| double | m_r2f_L |
| ControllerTwistFrontSteerPID | m_twist_control |
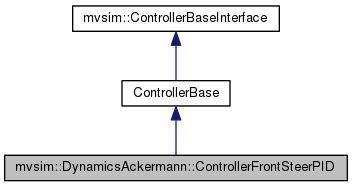
Detailed Description
PID controller that controls the vehicle with front traction & steering from steer & linear speed commands
Definition at line 134 of file VehicleAckermann.h.
Constructor & Destructor Documentation
Definition at line 16 of file VehicleAckermann_ControllerFrontSteerPID.cpp.
Member Function Documentation
| static const char* mvsim::DynamicsAckermann::ControllerFrontSteerPID::class_name | ( | ) | [inline, static] |
Directly set these values to tell the controller the desired setpoints
Definition at line 138 of file VehicleAckermann.h.
| void DynamicsAckermann::ControllerFrontSteerPID::control_step | ( | const DynamicsAckermann::TControllerInput & | ci, |
| DynamicsAckermann::TControllerOutput & | co | ||
| ) | [virtual] |
(m/s) and steering angle (rad)
Definition at line 33 of file VehicleAckermann_ControllerFrontSteerPID.cpp.
| void DynamicsAckermann::ControllerFrontSteerPID::load_config | ( | const rapidxml::xml_node< char > & | node | ) | [virtual] |
Override to load class-specific options from the <controller> node
Reimplemented from mvsim::ControllerBaseTempl< VEH_DYNAMICS >.
Definition at line 65 of file VehicleAckermann_ControllerFrontSteerPID.cpp.
| void DynamicsAckermann::ControllerFrontSteerPID::teleop_interface | ( | const TeleopInput & | in, |
| TeleopOutput & | out | ||
| ) | [virtual] |
This is to handle basic need of all the controllers.
Reimplemented from mvsim::ControllerBaseTempl< VEH_DYNAMICS >.
Definition at line 81 of file VehicleAckermann_ControllerFrontSteerPID.cpp.
Member Data Documentation
PID controller parameters.
Definition at line 152 of file VehicleAckermann.h.
Definition at line 152 of file VehicleAckermann.h.
Definition at line 152 of file VehicleAckermann.h.
double mvsim::DynamicsAckermann::ControllerFrontSteerPID::m_r2f_L [private] |
Definition at line 156 of file VehicleAckermann.h.
ControllerTwistFrontSteerPID mvsim::DynamicsAckermann::ControllerFrontSteerPID::m_twist_control [private] |
Definition at line 155 of file VehicleAckermann.h.
Maximum abs. value torque (for clamp) [Nm].
Definition at line 153 of file VehicleAckermann.h.
Definition at line 141 of file VehicleAckermann.h.
desired velocities
Definition at line 141 of file VehicleAckermann.h.
The documentation for this class was generated from the following files: