#include <CLoopCloserERD_MR.h>
Public Types | |
| typedef CLoopCloserERD< GRAPH_T > | lc_parent_t |
| Handy typedefs. | |
| typedef CEdgeRegistrationDecider_MR < GRAPH_T > | mr_parent_t |
| typedef CLoopCloserERD_MR < GRAPH_T > | decider_t |
| typedef lc_parent_t::constraint_t | constraint_t |
| typedef lc_parent_t::pose_t | pose_t |
| typedef lc_parent_t::range_ops_t | range_ops_t |
| typedef lc_parent_t::partitions_t | partitions_t |
| typedef lc_parent_t::nodes_to_scans2D_t | nodes_to_scans2D_t |
| typedef mrpt::graphslam::CGraphSlamEngine_MR < GRAPH_T > | engine_t |
| typedef GRAPH_T::global_pose_t | global_pose_t |
Public Member Functions | |
| void | addBatchOfNodeIDsAndScans (const std::map< TNodeID, mrpt::obs::CObservation2DRangeScan::Ptr > &nodeIDs_to_scans2D) |
| void | addScanMatchingEdges (TNodeID curr_nodeID) |
| CLoopCloserERD_MR () | |
| void | fetchNodeIDsForScanMatching (const TNodeID &curr_nodeID, std::set< TNodeID > *nodes_set) |
| bool | updateState (mrpt::obs::CActionCollection::Ptr action, mrpt::obs::CSensoryFrame::Ptr observations, mrpt::obs::CObservation::Ptr observation) |
Detailed Description
template<class GRAPH_T>
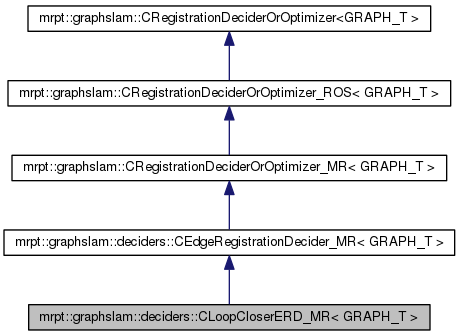
class mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >
Loop Closer Edge Registration Decider class that can also be used in multi-robot SLAM operations since it can utilize information from other robot agents and correct own graph according to the strategy described in [1].
- Note:
- Multi-robot-related classes are suffixed with _MR.
Definition at line 26 of file CLoopCloserERD_MR.h.
Member Typedef Documentation
| typedef lc_parent_t::constraint_t mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::constraint_t |
Definition at line 37 of file CLoopCloserERD_MR.h.
| typedef CLoopCloserERD_MR<GRAPH_T> mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::decider_t |
handy self type
Definition at line 36 of file CLoopCloserERD_MR.h.
| typedef mrpt::graphslam::CGraphSlamEngine_MR<GRAPH_T> mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::engine_t |
Reimplemented from mrpt::graphslam::CRegistrationDeciderOrOptimizer_MR< GRAPH_T >.
Definition at line 42 of file CLoopCloserERD_MR.h.
| typedef GRAPH_T::global_pose_t mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::global_pose_t |
Definition at line 43 of file CLoopCloserERD_MR.h.
| typedef CLoopCloserERD<GRAPH_T> mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::lc_parent_t |
Handy typedefs.
type of graph constraints parent class
Definition at line 34 of file CLoopCloserERD_MR.h.
| typedef CEdgeRegistrationDecider_MR<GRAPH_T> mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::mr_parent_t |
parent class
Definition at line 35 of file CLoopCloserERD_MR.h.
| typedef lc_parent_t::nodes_to_scans2D_t mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::nodes_to_scans2D_t |
Definition at line 41 of file CLoopCloserERD_MR.h.
| typedef lc_parent_t::partitions_t mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::partitions_t |
Definition at line 40 of file CLoopCloserERD_MR.h.
| typedef lc_parent_t::pose_t mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::pose_t |
Definition at line 38 of file CLoopCloserERD_MR.h.
| typedef lc_parent_t::range_ops_t mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::range_ops_t |
Definition at line 39 of file CLoopCloserERD_MR.h.
Constructor & Destructor Documentation
| mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::CLoopCloserERD_MR | ( | ) |
Definition at line 16 of file CLoopCloserERD_MR_impl.h.
Member Function Documentation
| void mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::addBatchOfNodeIDsAndScans | ( | const std::map< TNodeID, mrpt::obs::CObservation2DRangeScan::Ptr > & | nodeIDs_to_scans2D | ) | [virtual] |
Reimplemented from mrpt::graphslam::deciders::CEdgeRegistrationDecider_MR< GRAPH_T >.
Definition at line 27 of file CLoopCloserERD_MR_impl.h.
| void mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::addScanMatchingEdges | ( | TNodeID | curr_nodeID | ) |
Definition at line 39 of file CLoopCloserERD_MR_impl.h.
| void mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::fetchNodeIDsForScanMatching | ( | const TNodeID & | curr_nodeID, |
| std::set< TNodeID > * | nodes_set | ||
| ) |
Definition at line 54 of file CLoopCloserERD_MR_impl.h.
| bool mrpt::graphslam::deciders::CLoopCloserERD_MR< GRAPH_T >::updateState | ( | mrpt::obs::CActionCollection::Ptr | action, |
| mrpt::obs::CSensoryFrame::Ptr | observations, | ||
| mrpt::obs::CObservation::Ptr | observation | ||
| ) |
Definition at line 73 of file CLoopCloserERD_MR_impl.h.
The documentation for this class was generated from the following files: