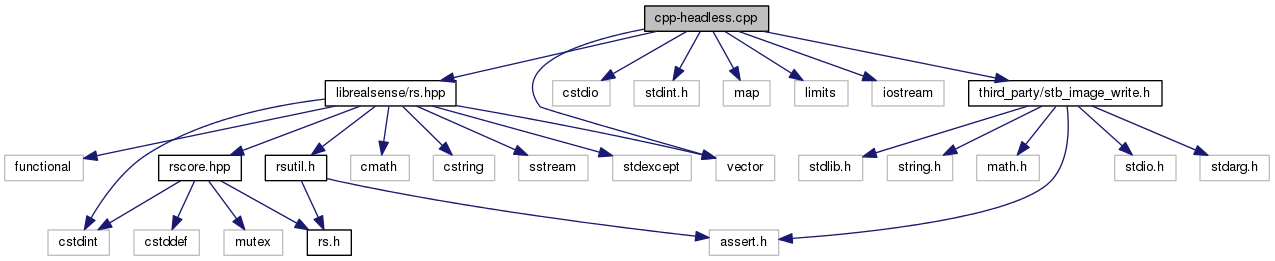
#include <librealsense/rs.hpp>#include <cstdio>#include <stdint.h>#include <vector>#include <map>#include <limits>#include <iostream>#include "third_party/stb_image_write.h"
Include dependency graph for cpp-headless.cpp:
Go to the source code of this file.
Classes | |
| struct | stream_record |
Defines | |
| #define | STB_IMAGE_WRITE_IMPLEMENTATION |
Functions | |
| int | main () |
| void | normalize_depth_to_rgb (uint8_t rgb_image[], const uint16_t depth_image[], int width, int height) |
Variables | |
| std::map< rs::stream, int > | components_map |
Define Documentation
| #define STB_IMAGE_WRITE_IMPLEMENTATION |
Definition at line 20 of file cpp-headless.cpp.
Function Documentation
Definition at line 63 of file cpp-headless.cpp.
| void normalize_depth_to_rgb | ( | uint8_t | rgb_image[], |
| const uint16_t | depth_image[], | ||
| int | width, | ||
| int | height | ||
| ) |
Definition at line 23 of file cpp-headless.cpp.
Variable Documentation
| std::map<rs::stream,int> components_map |
Initial value:
{
{ rs::stream::depth, 3 },
{ rs::stream::color, 3 },
{ rs::stream::infrared , 1 },
{ rs::stream::infrared2, 1 },
{ rs::stream::fisheye, 1 }
}
Definition at line 43 of file cpp-headless.cpp.